
documents/docs/RK3568_Android_SDK开发文档/RK3568_Android_SDK开发文档.md
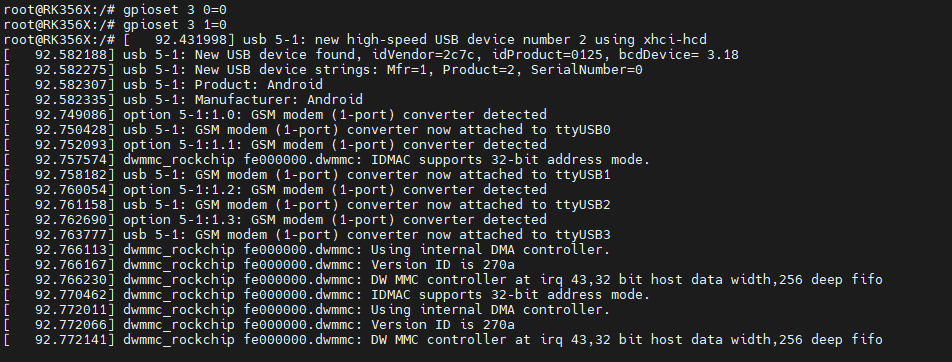
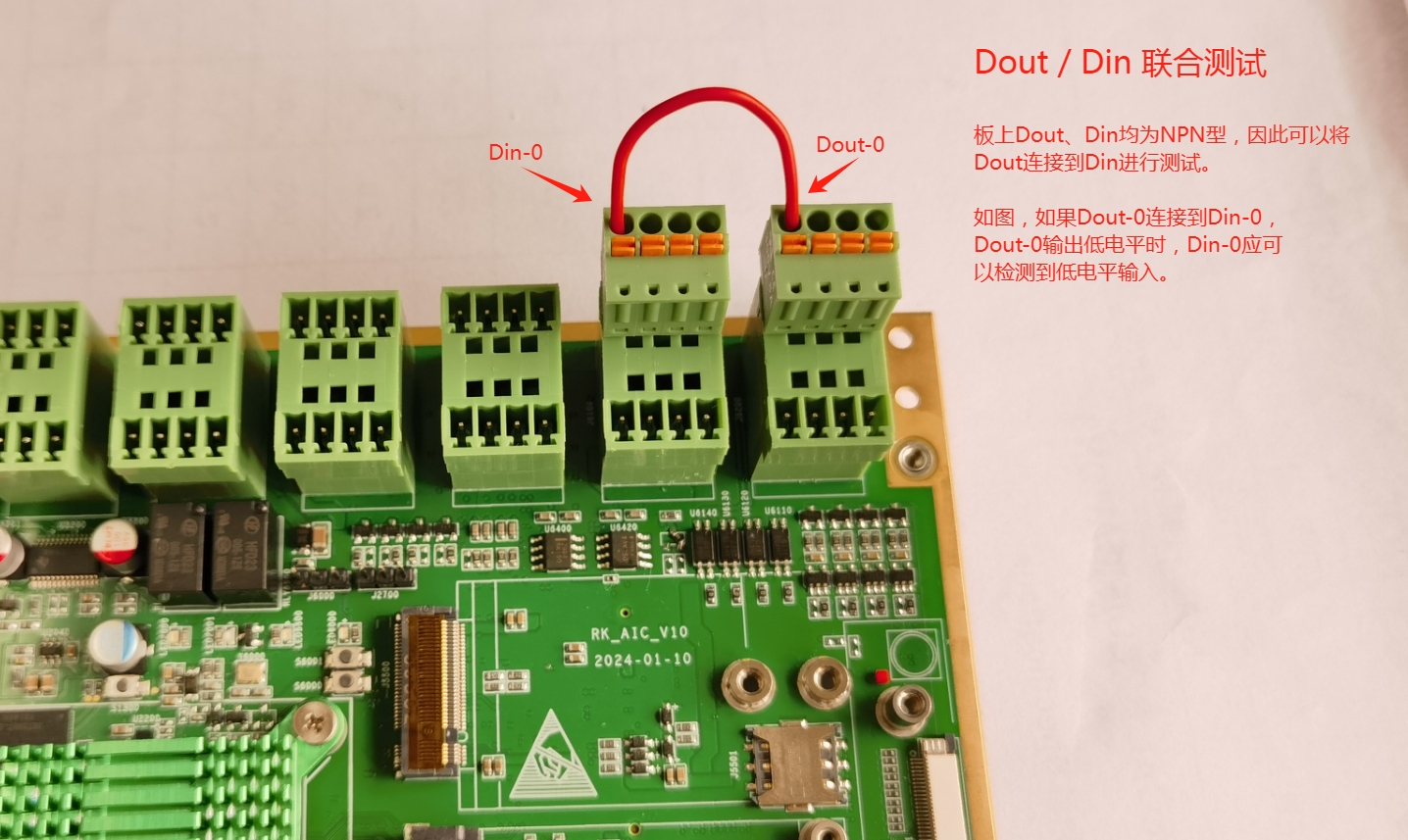
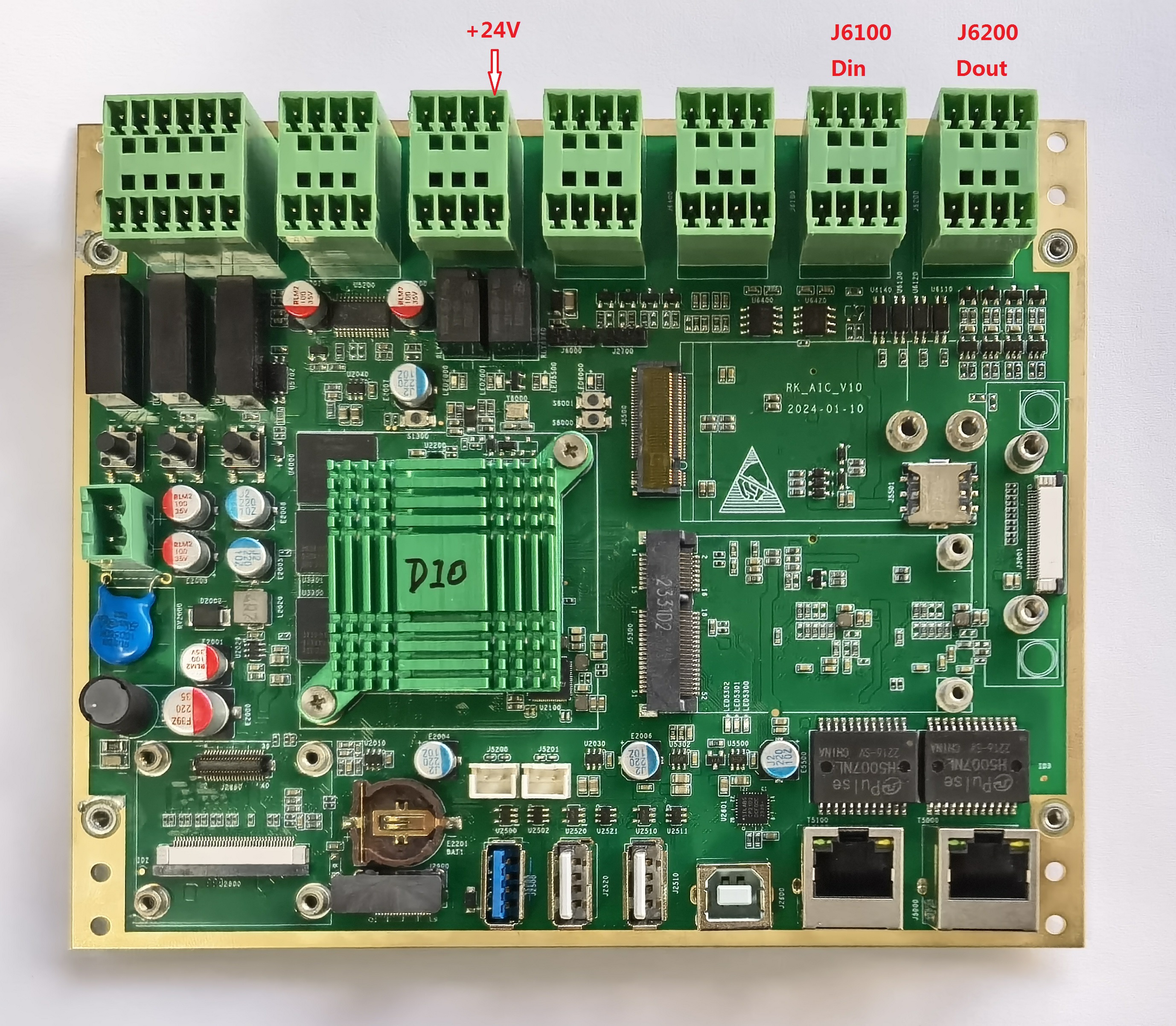
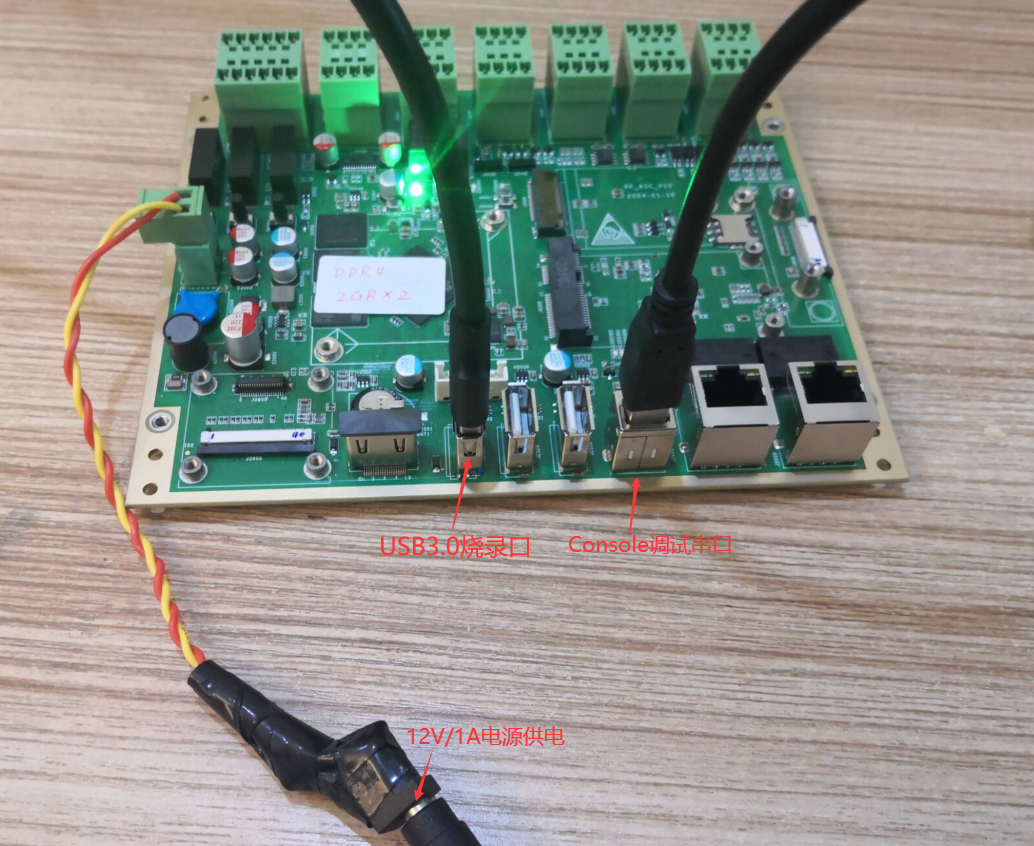
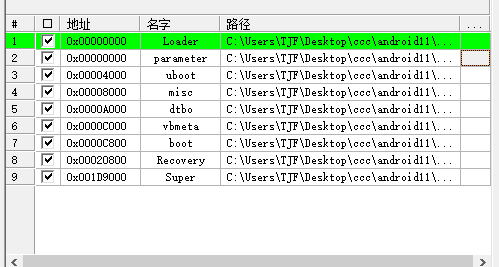
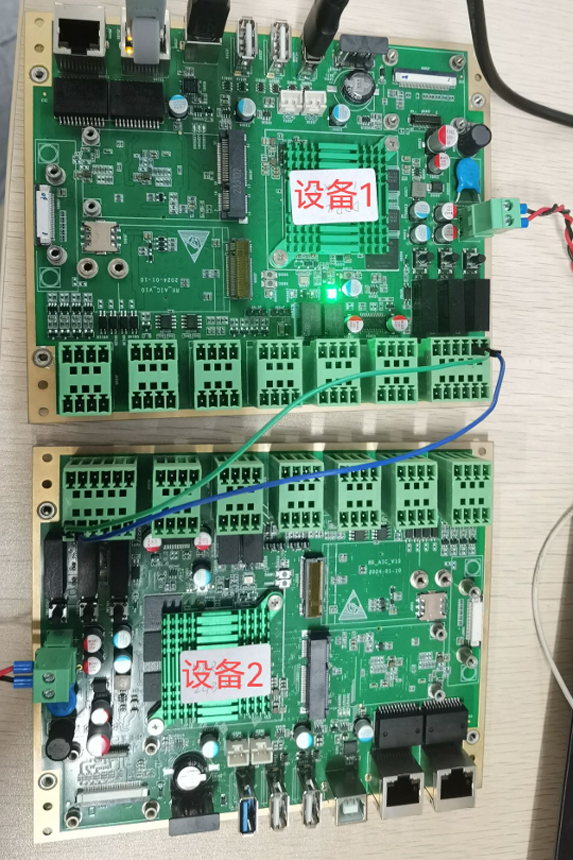
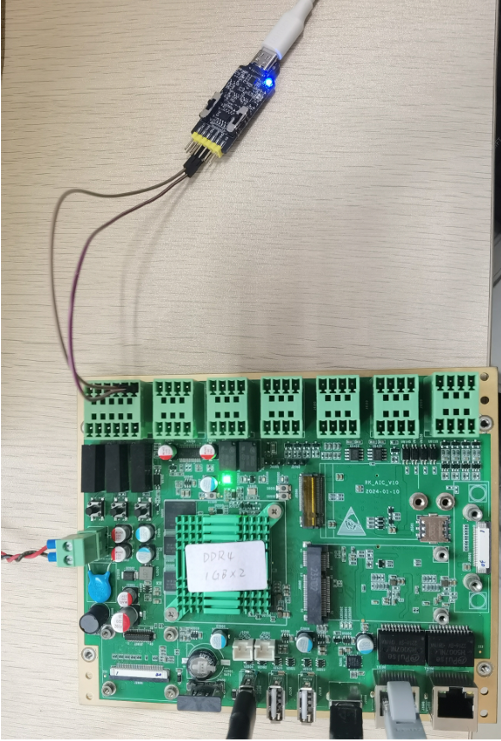
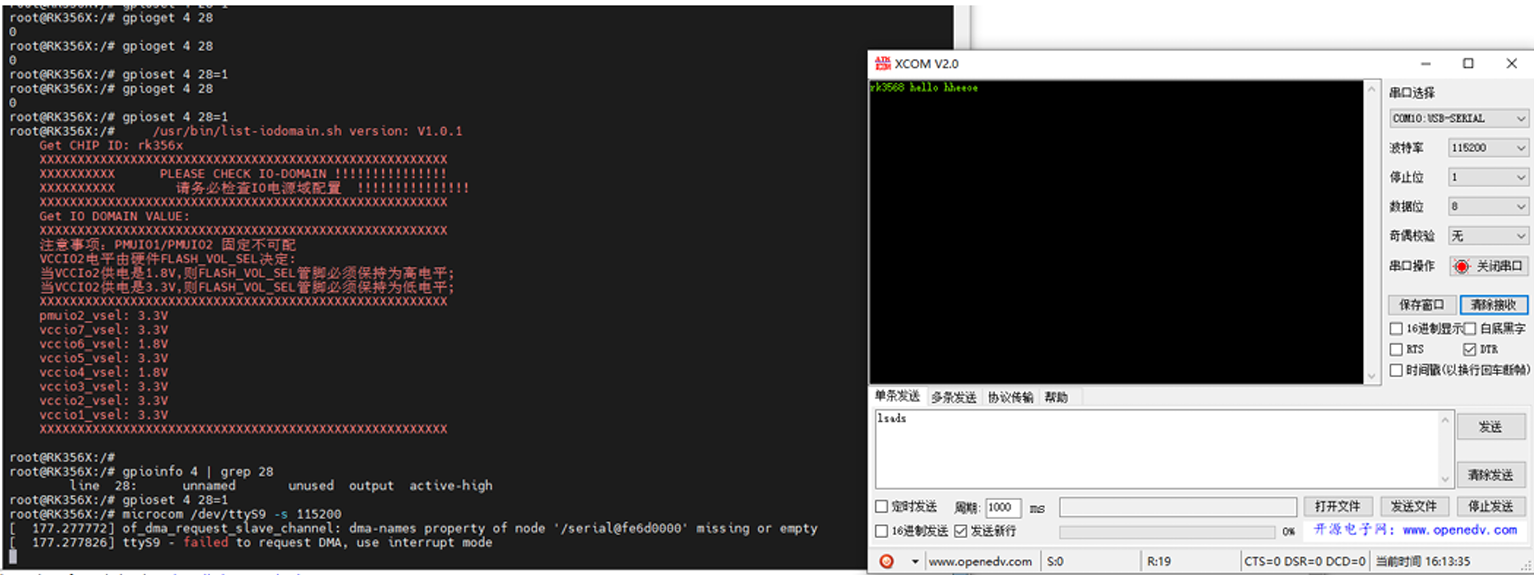
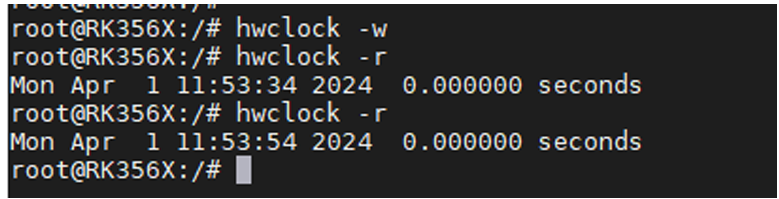
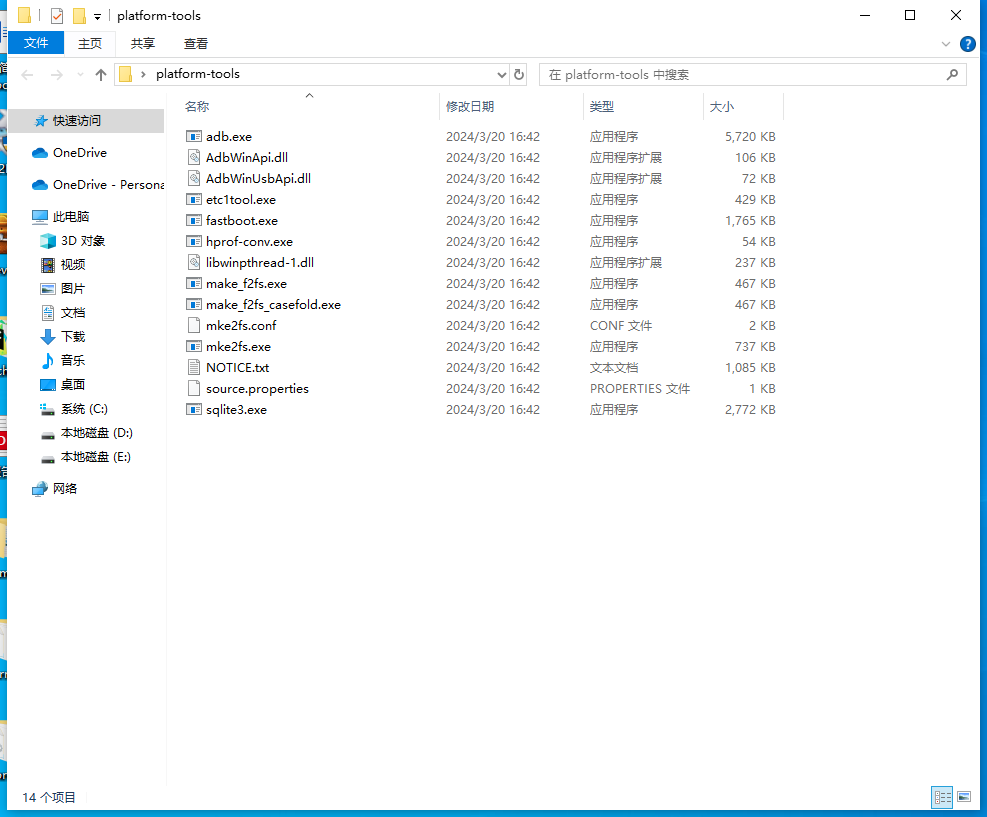
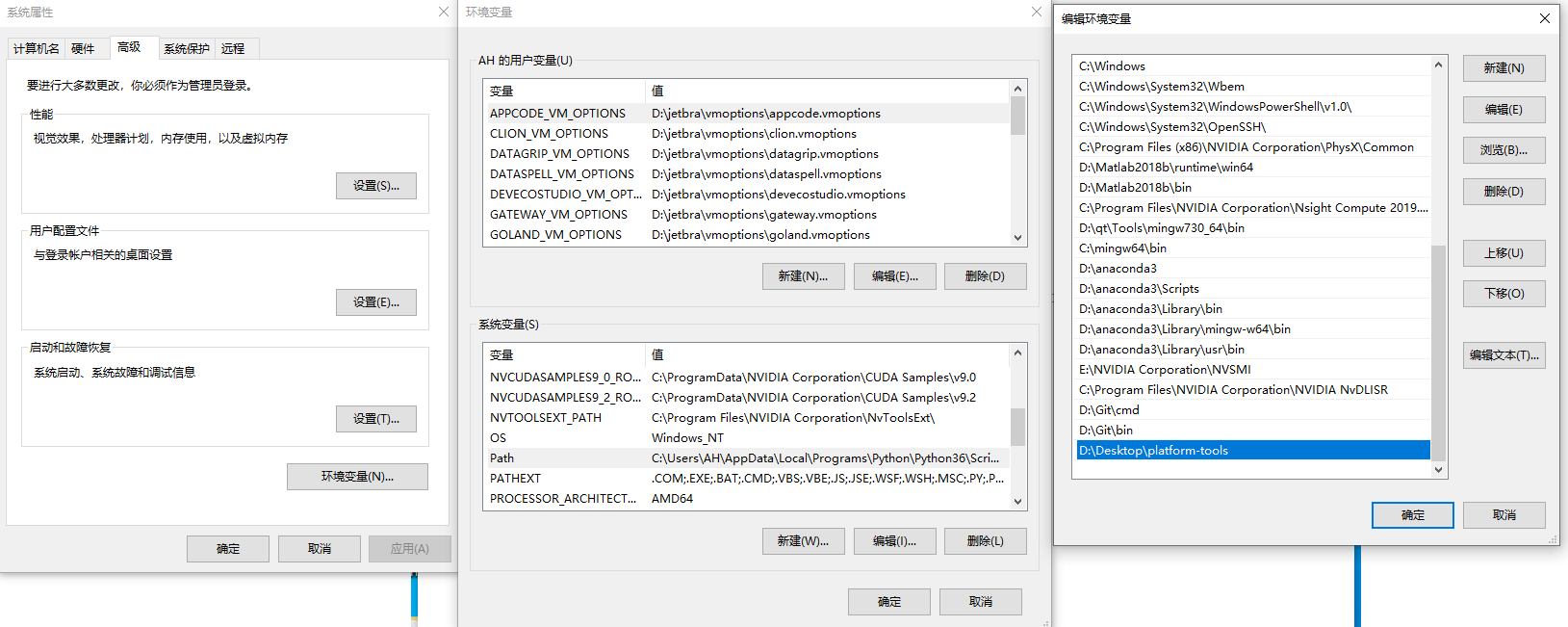
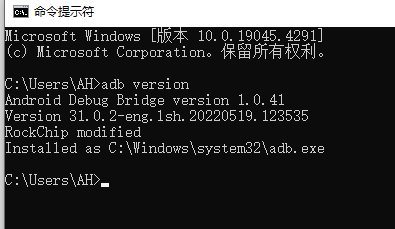
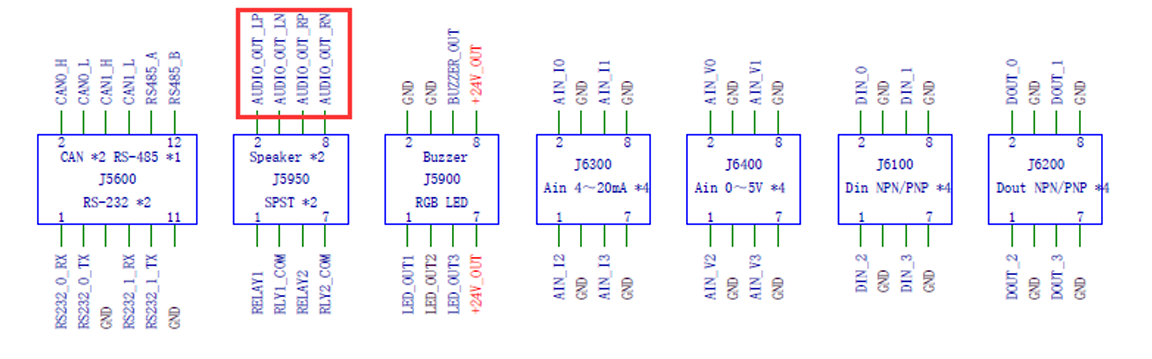
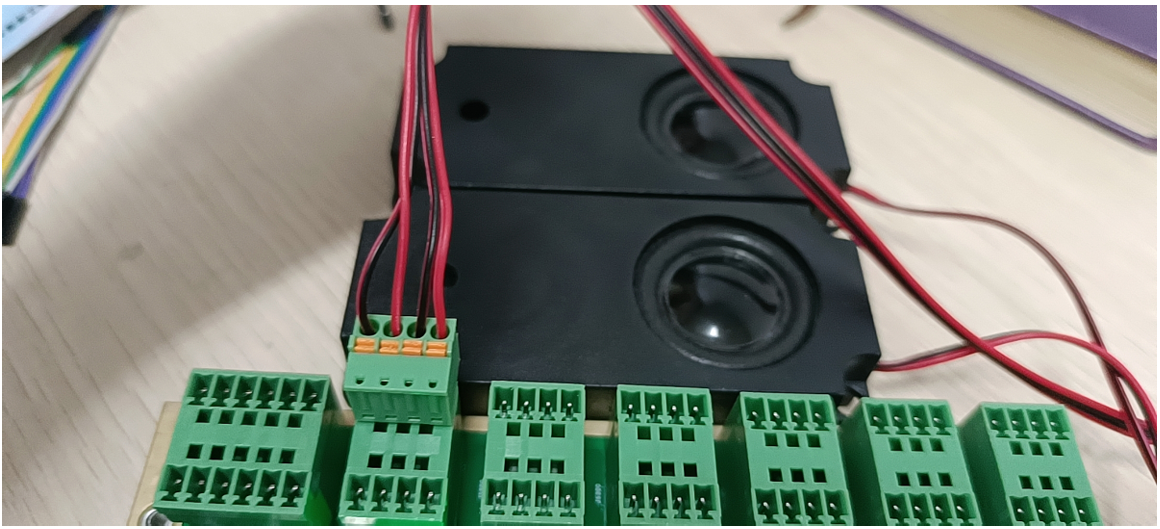
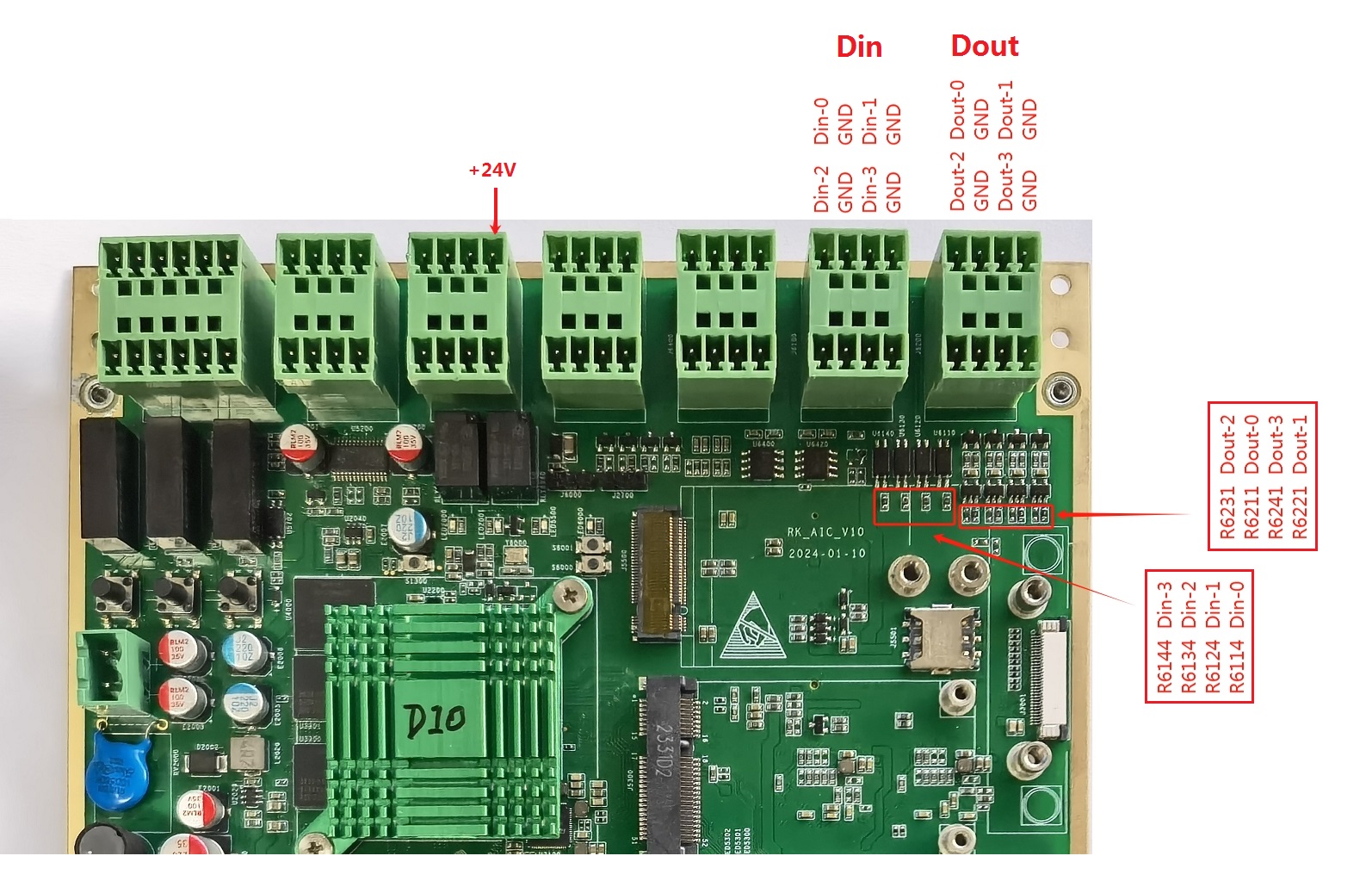
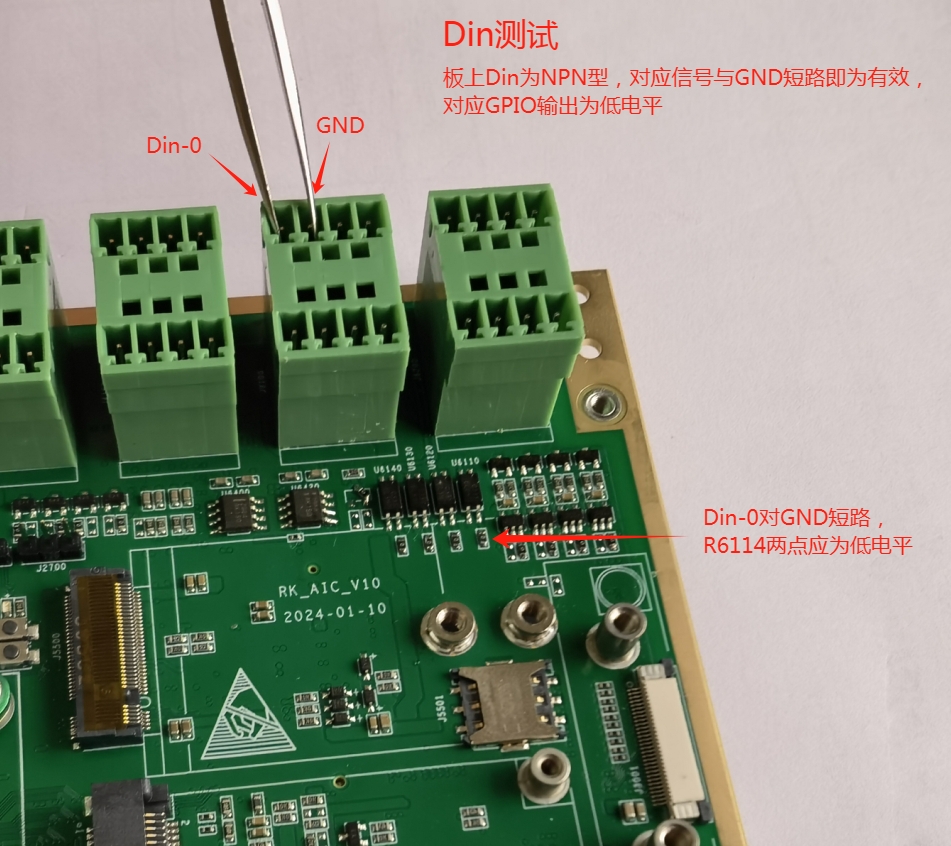
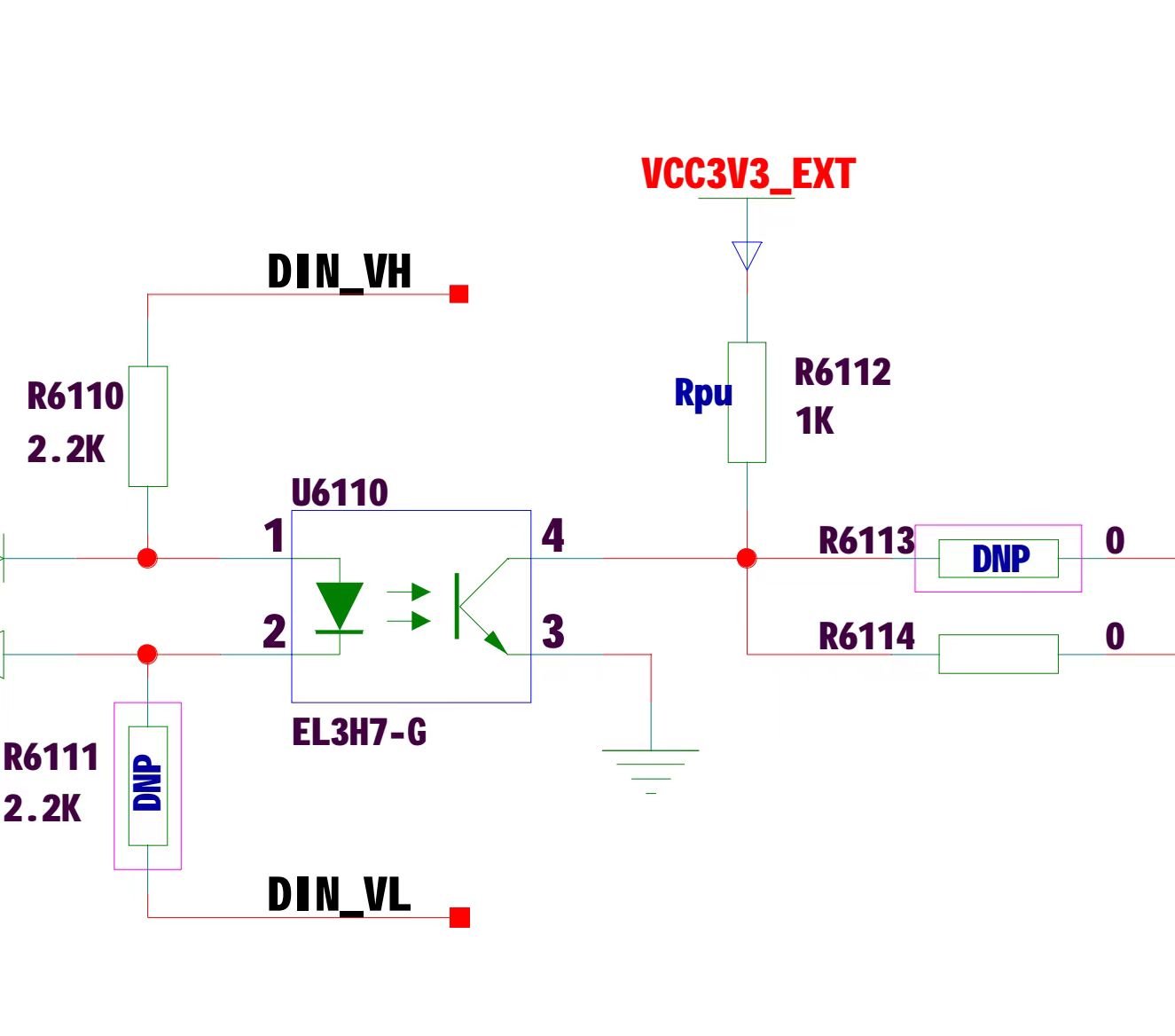
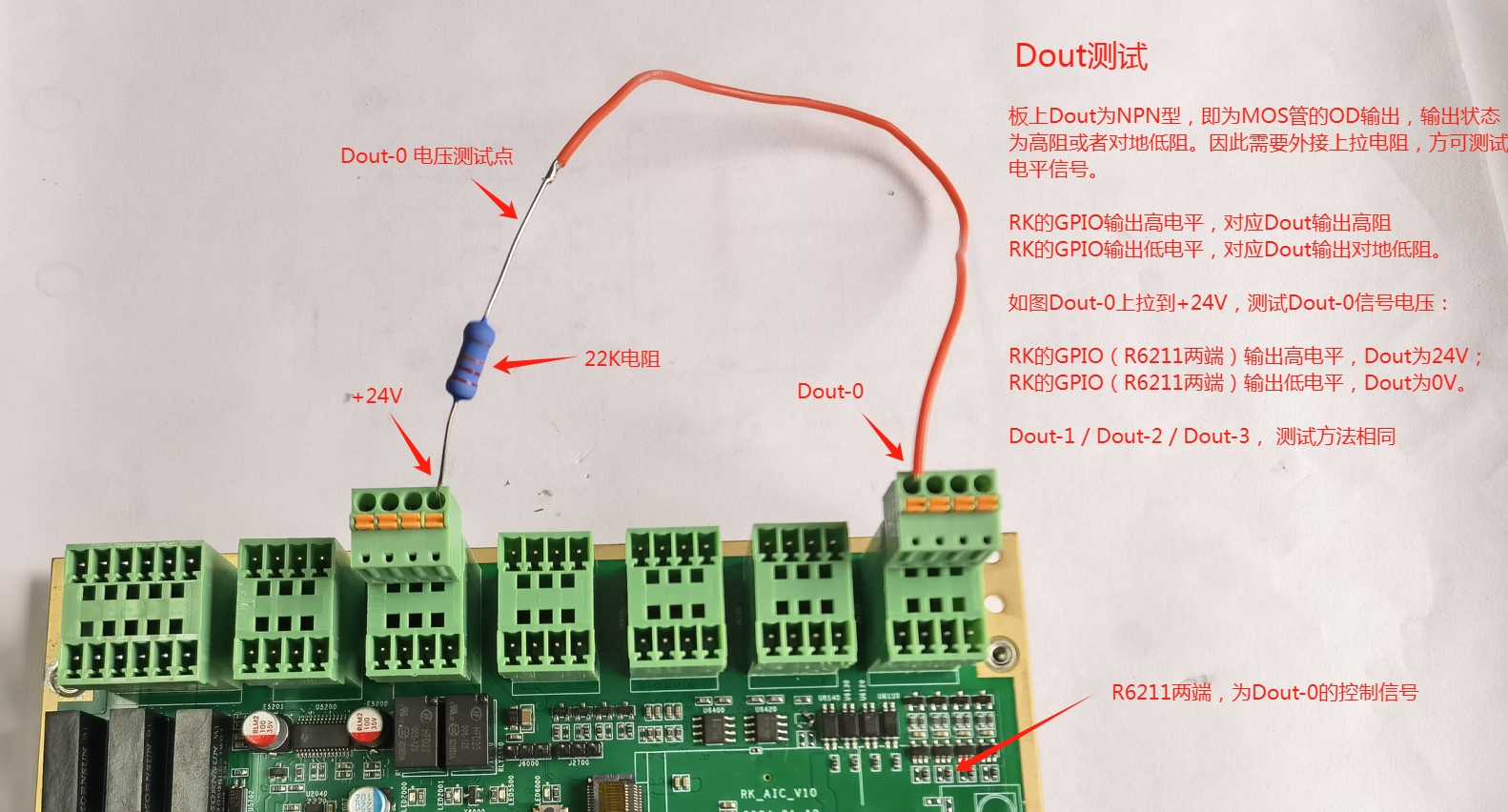
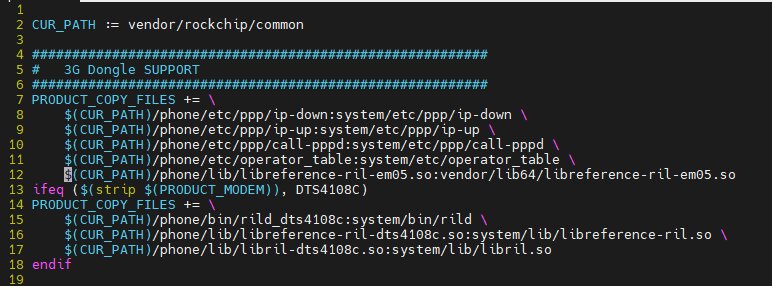
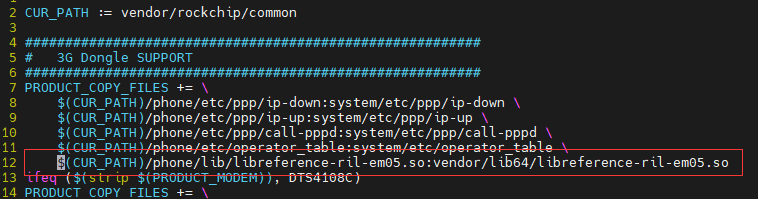
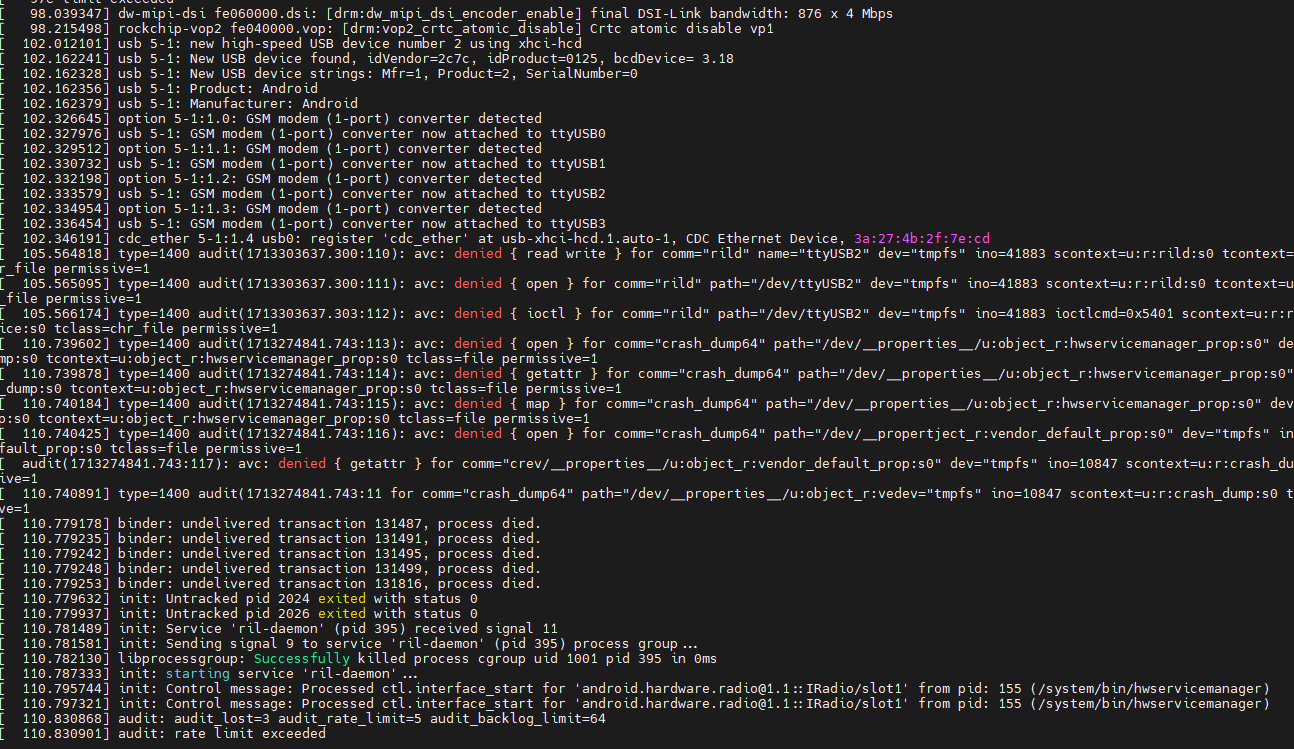
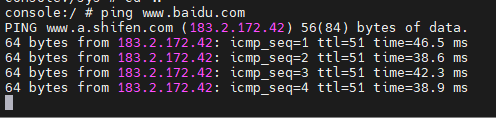
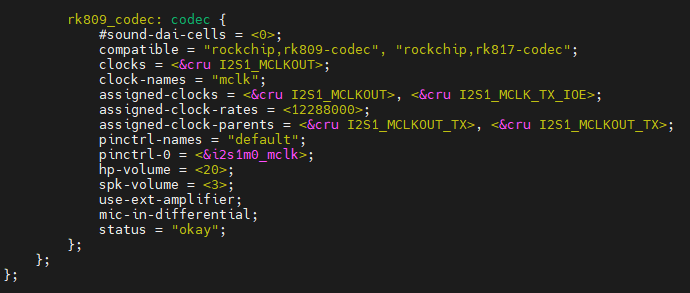
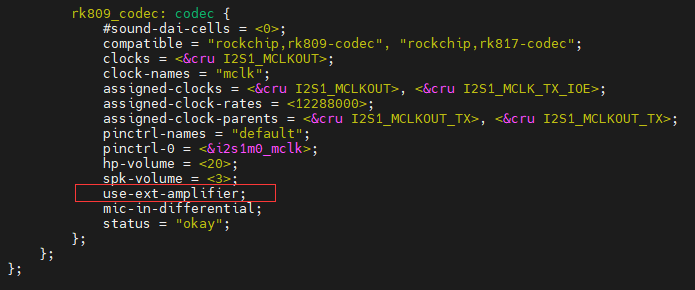
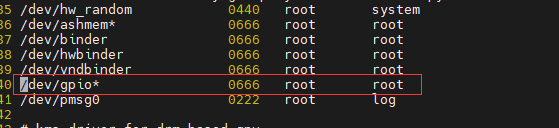
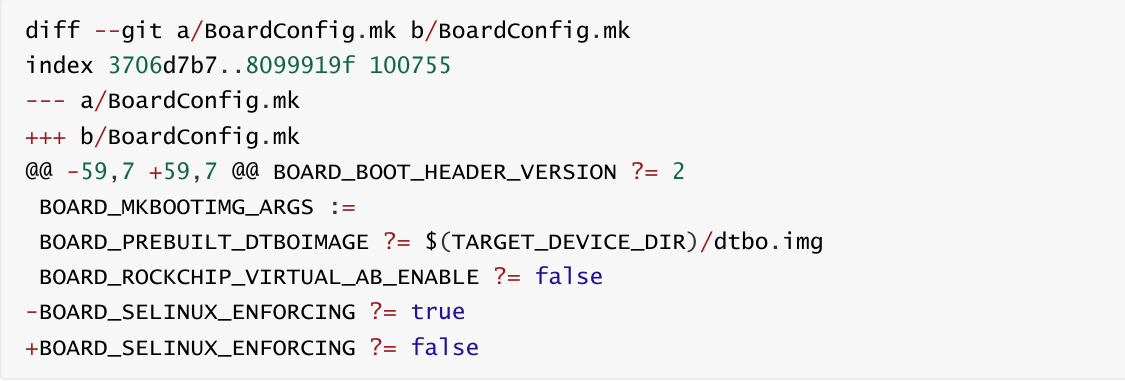
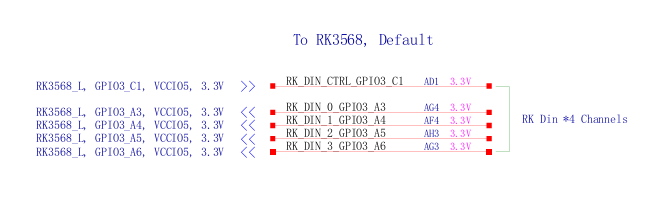
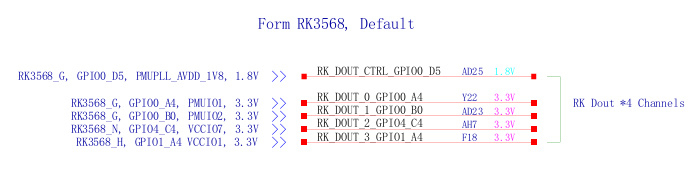
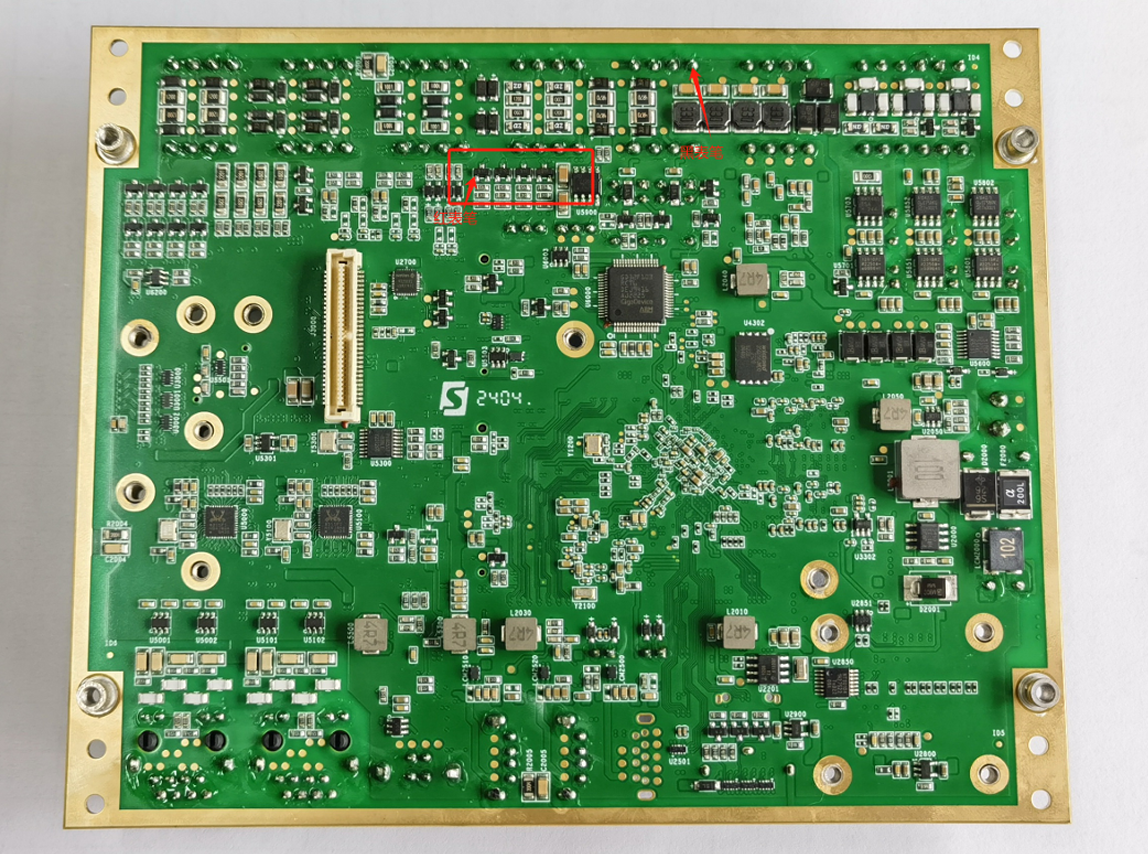
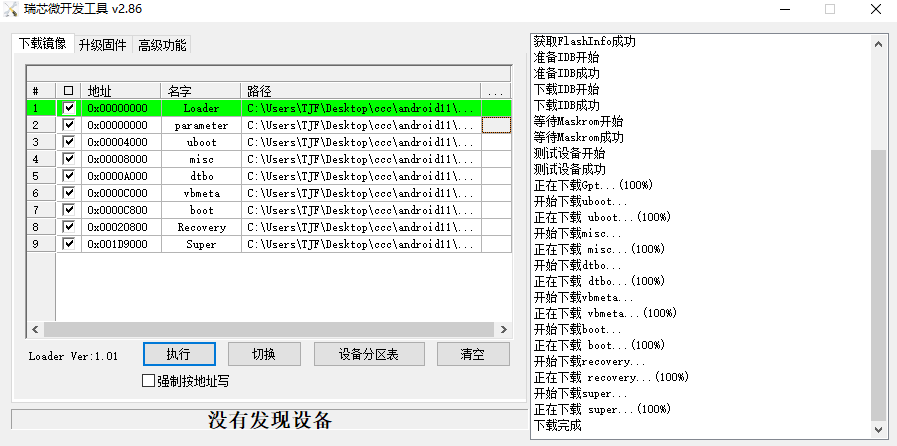
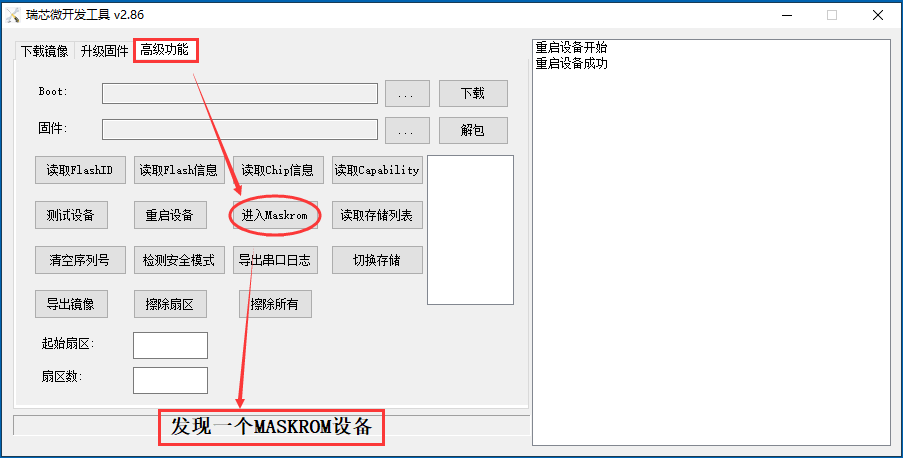
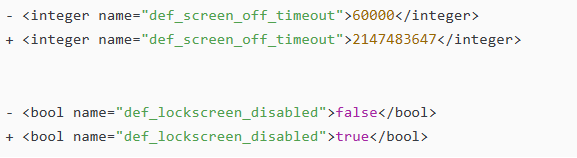
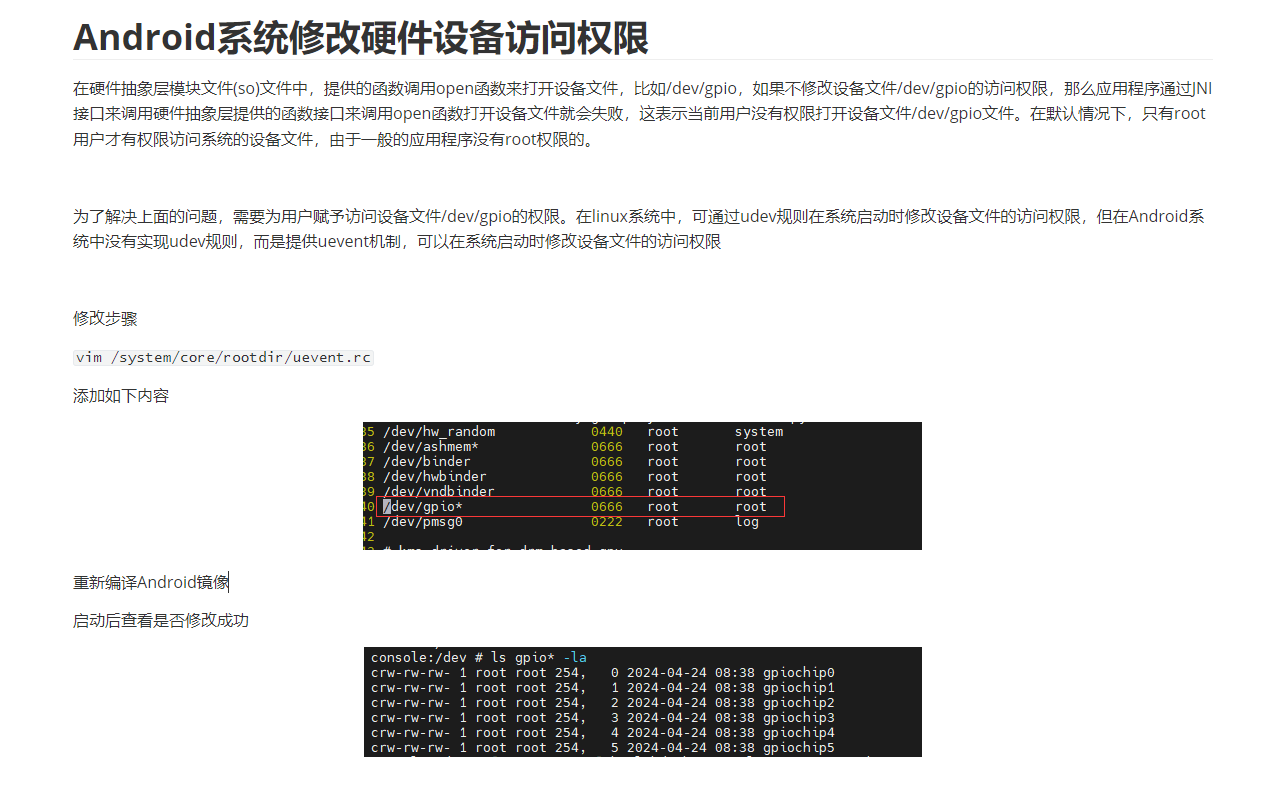
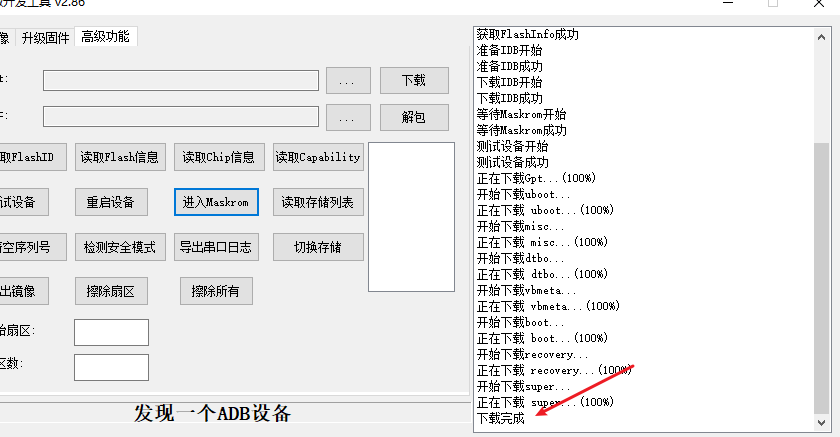
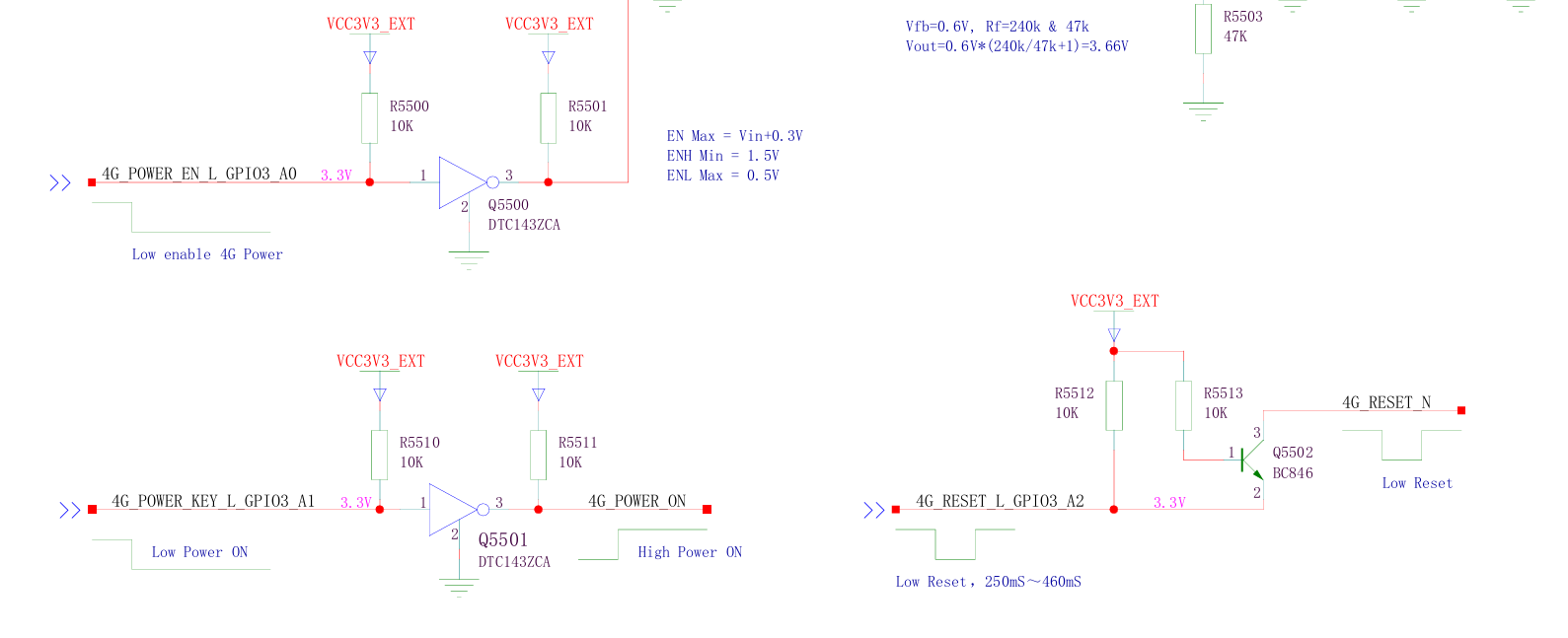
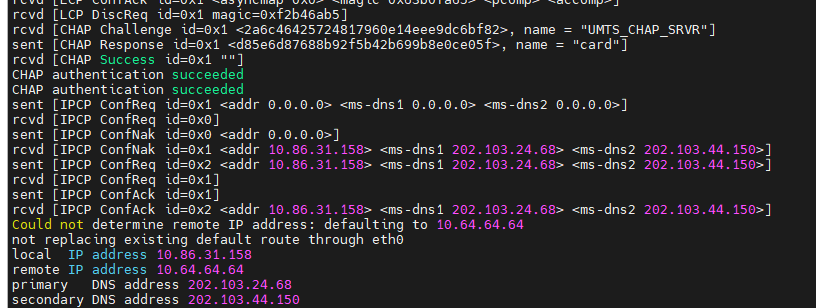
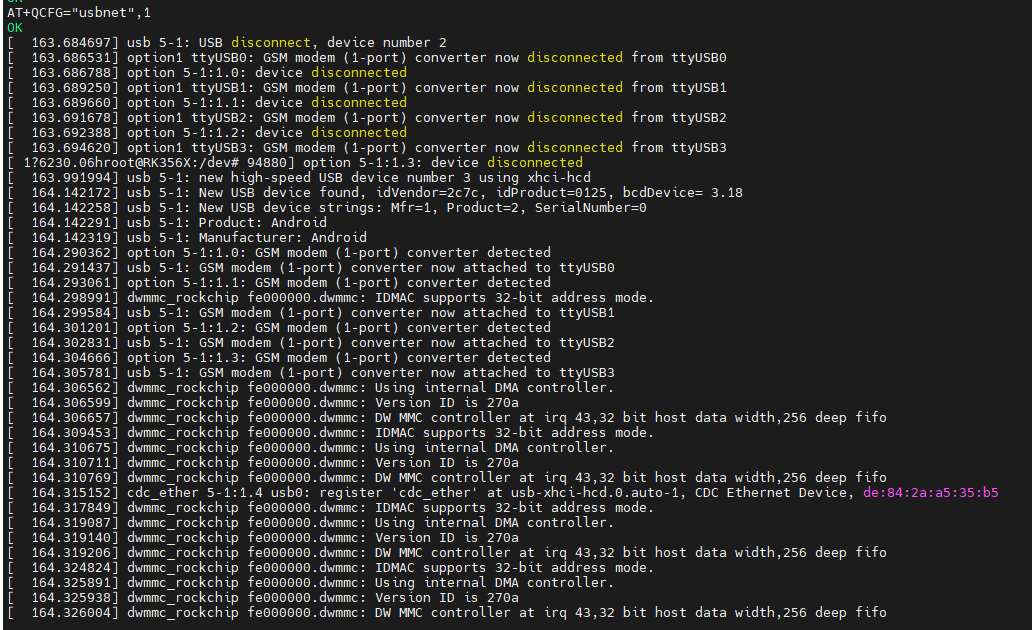
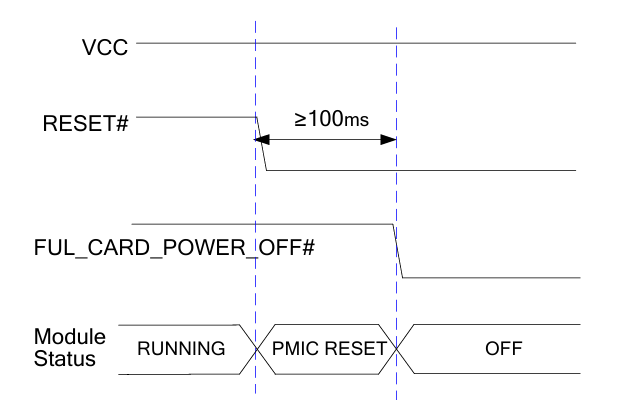
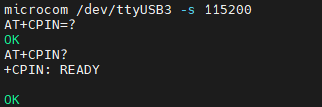
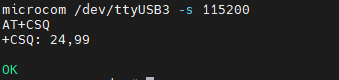
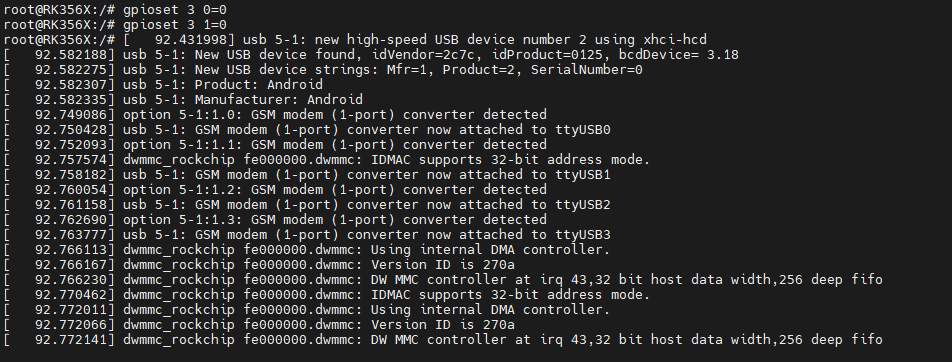
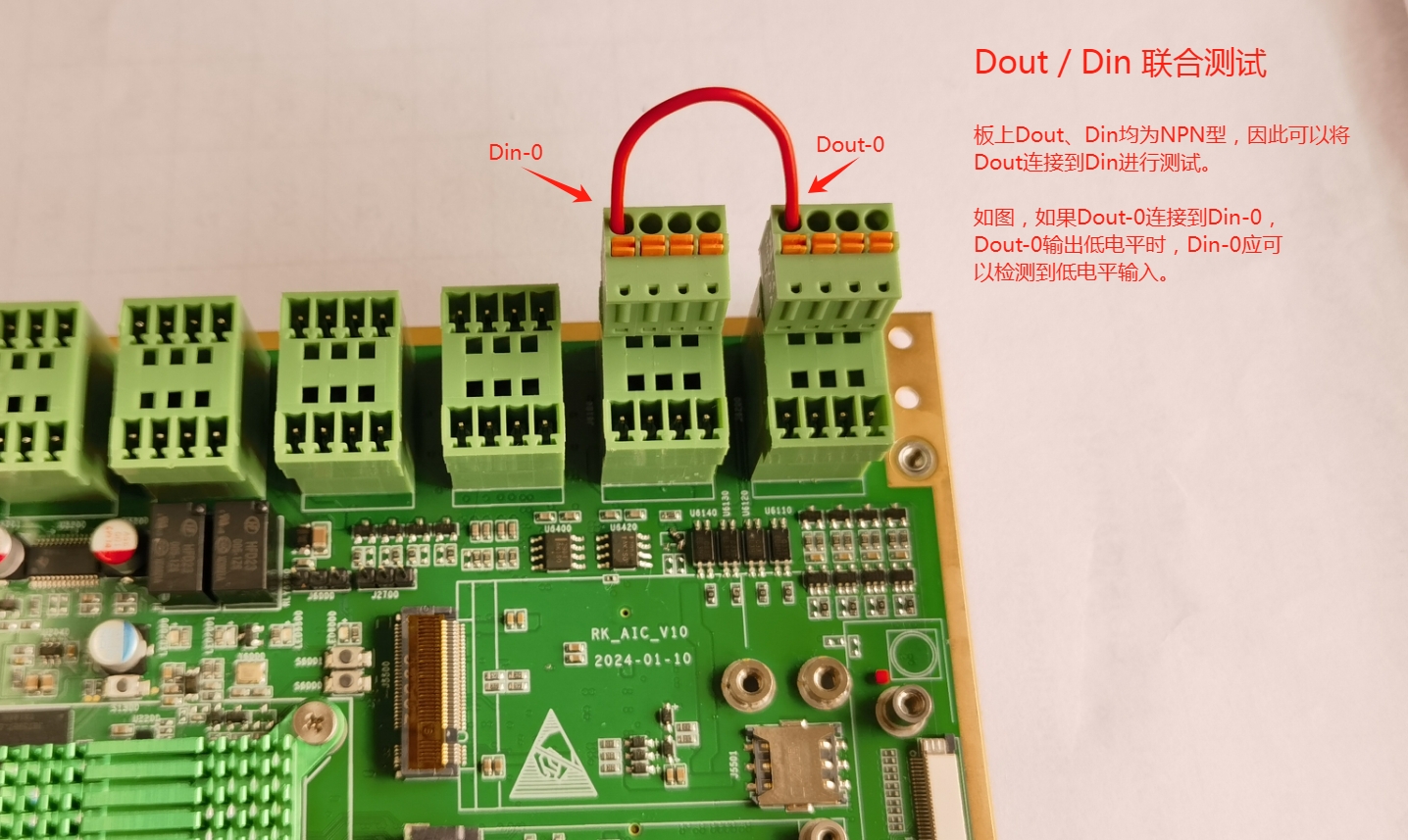
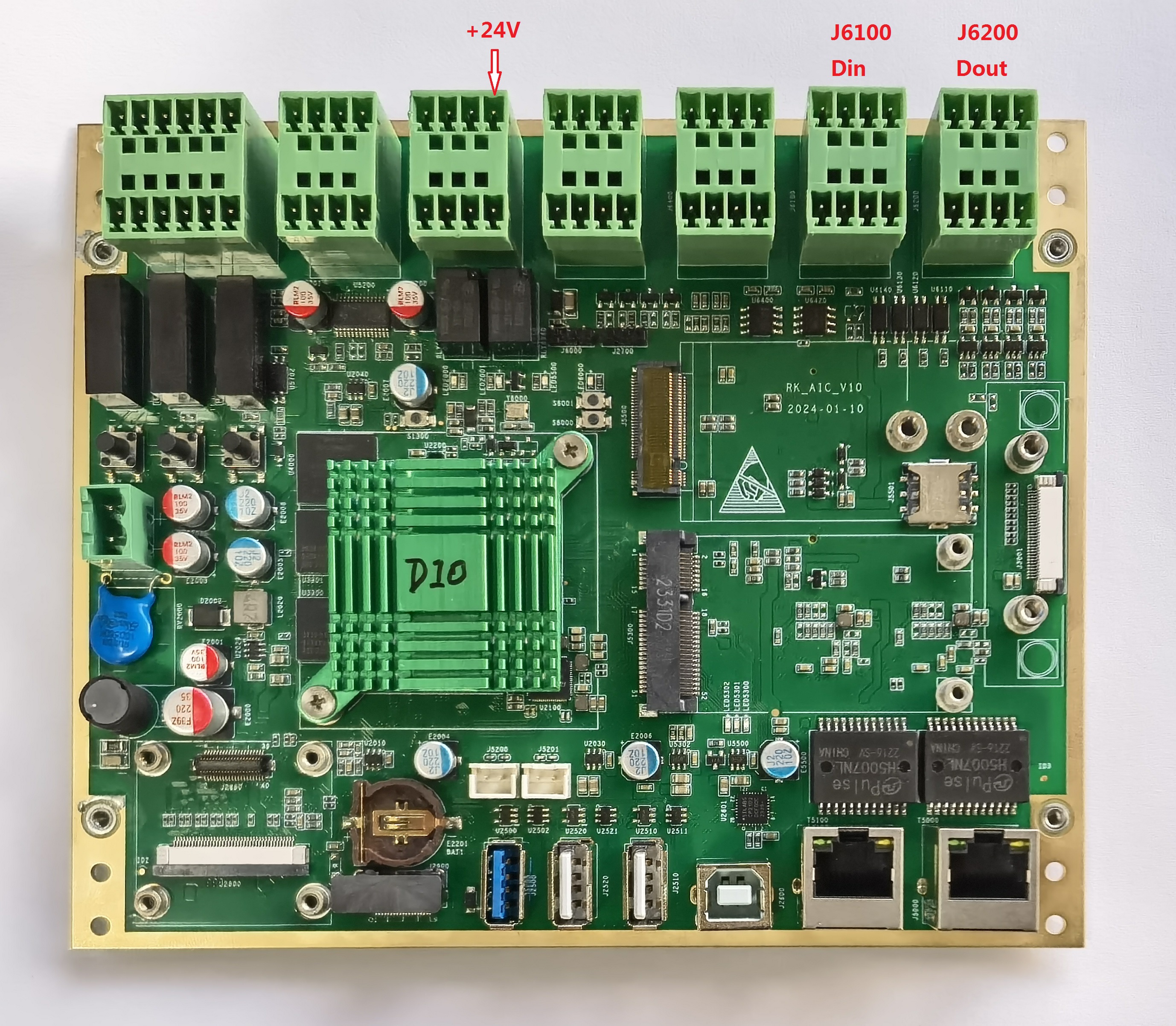
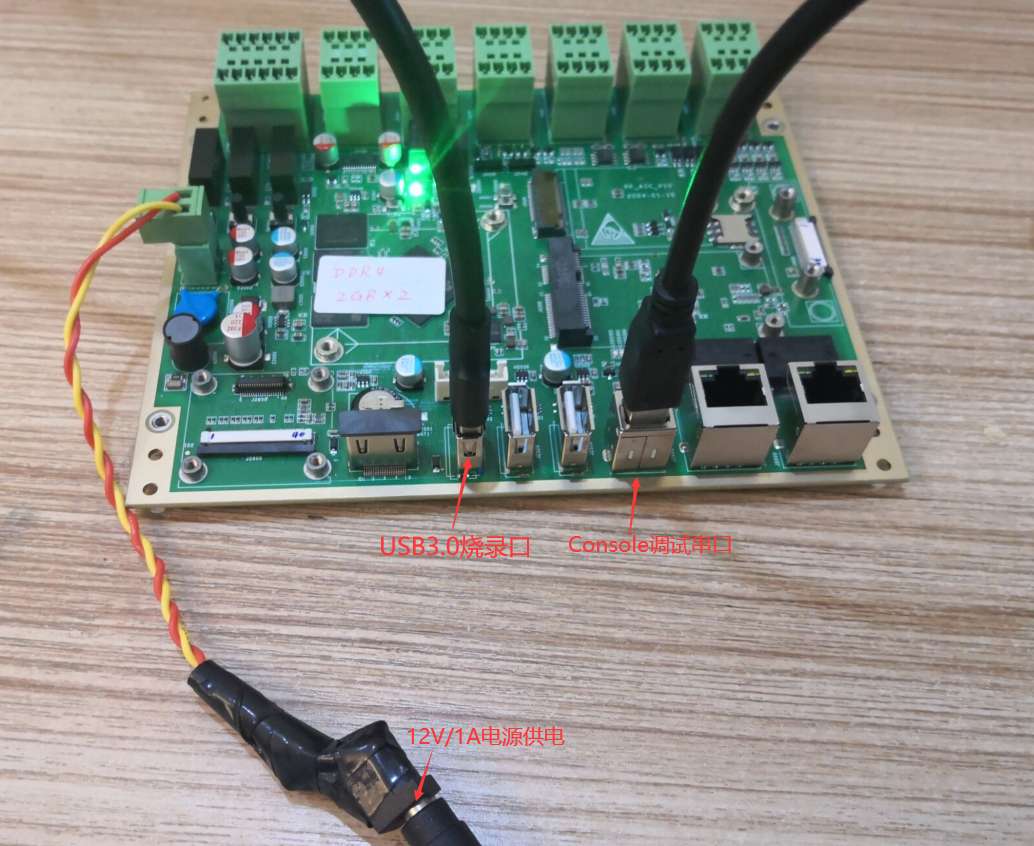
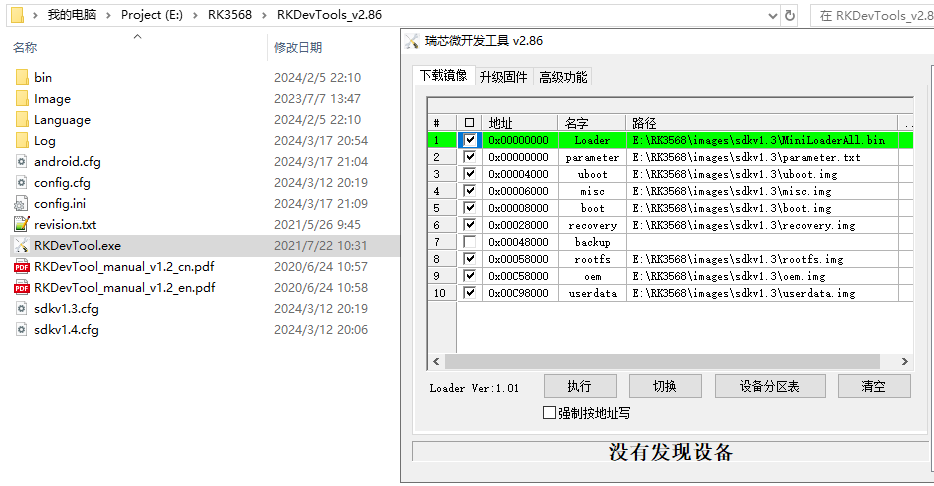
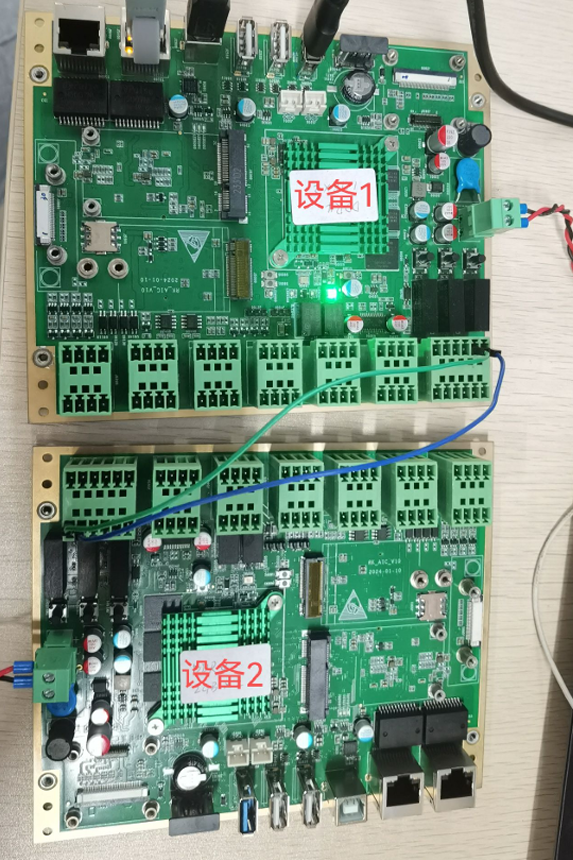
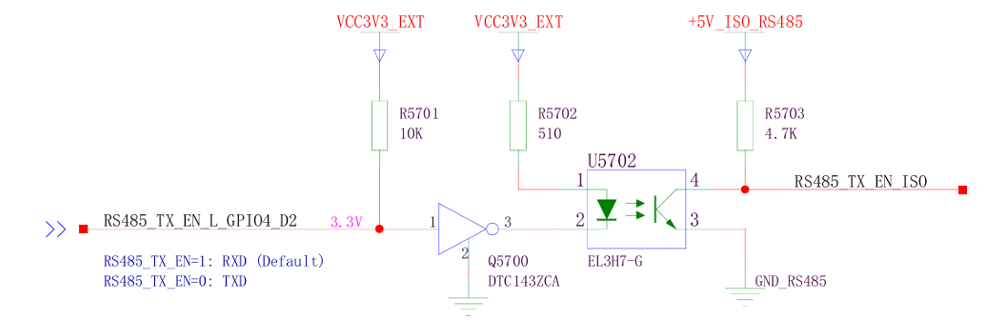
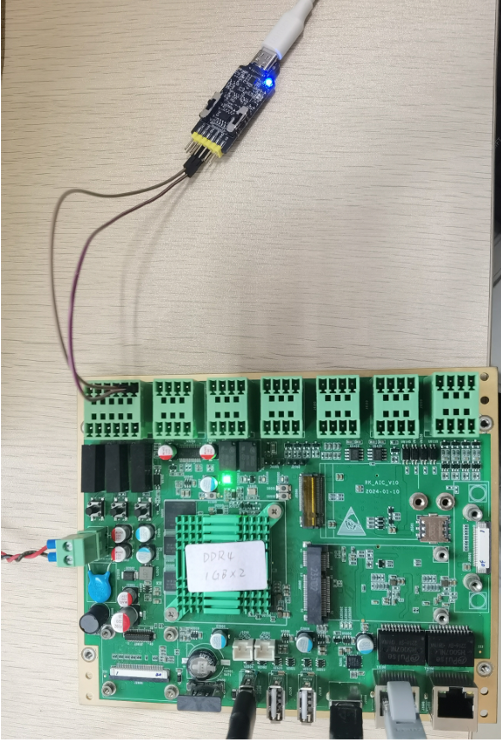
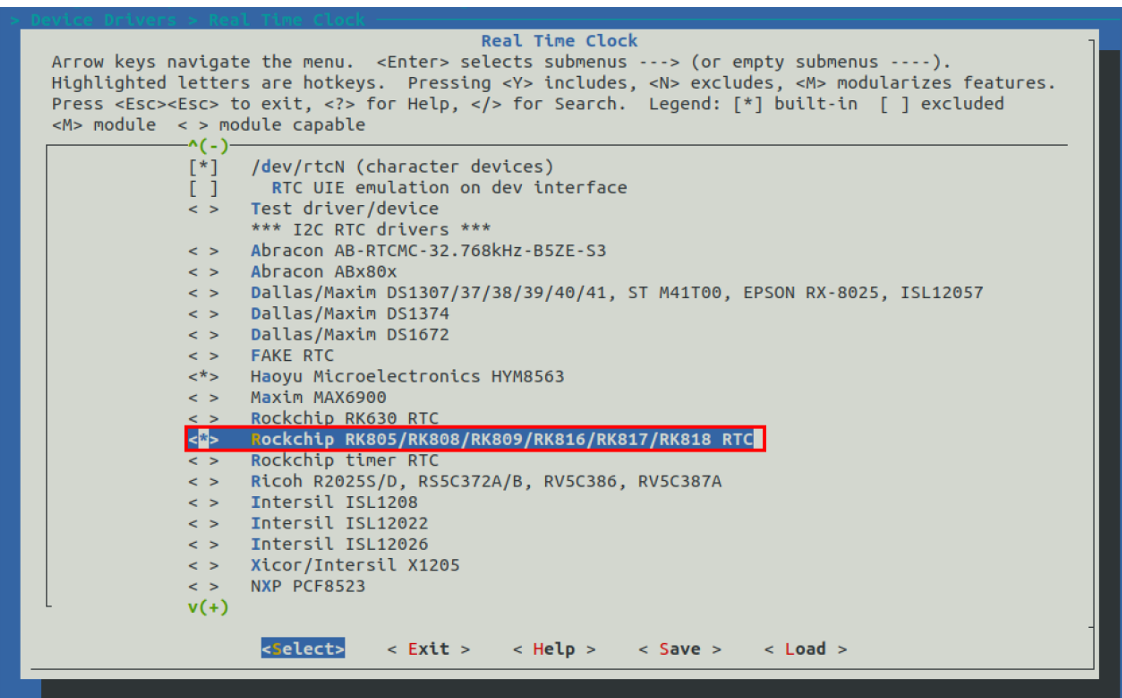
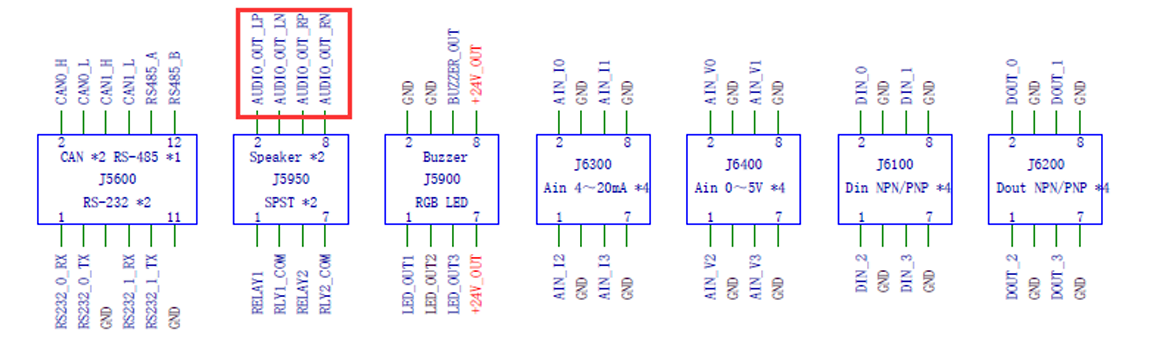
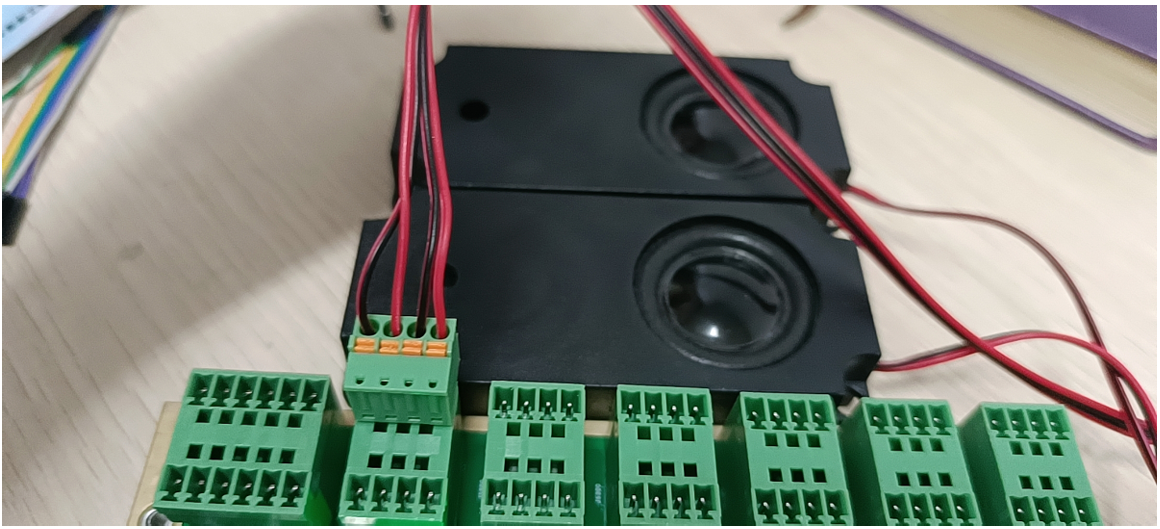
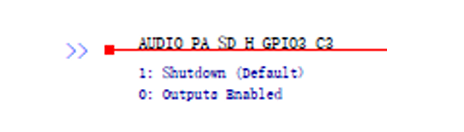
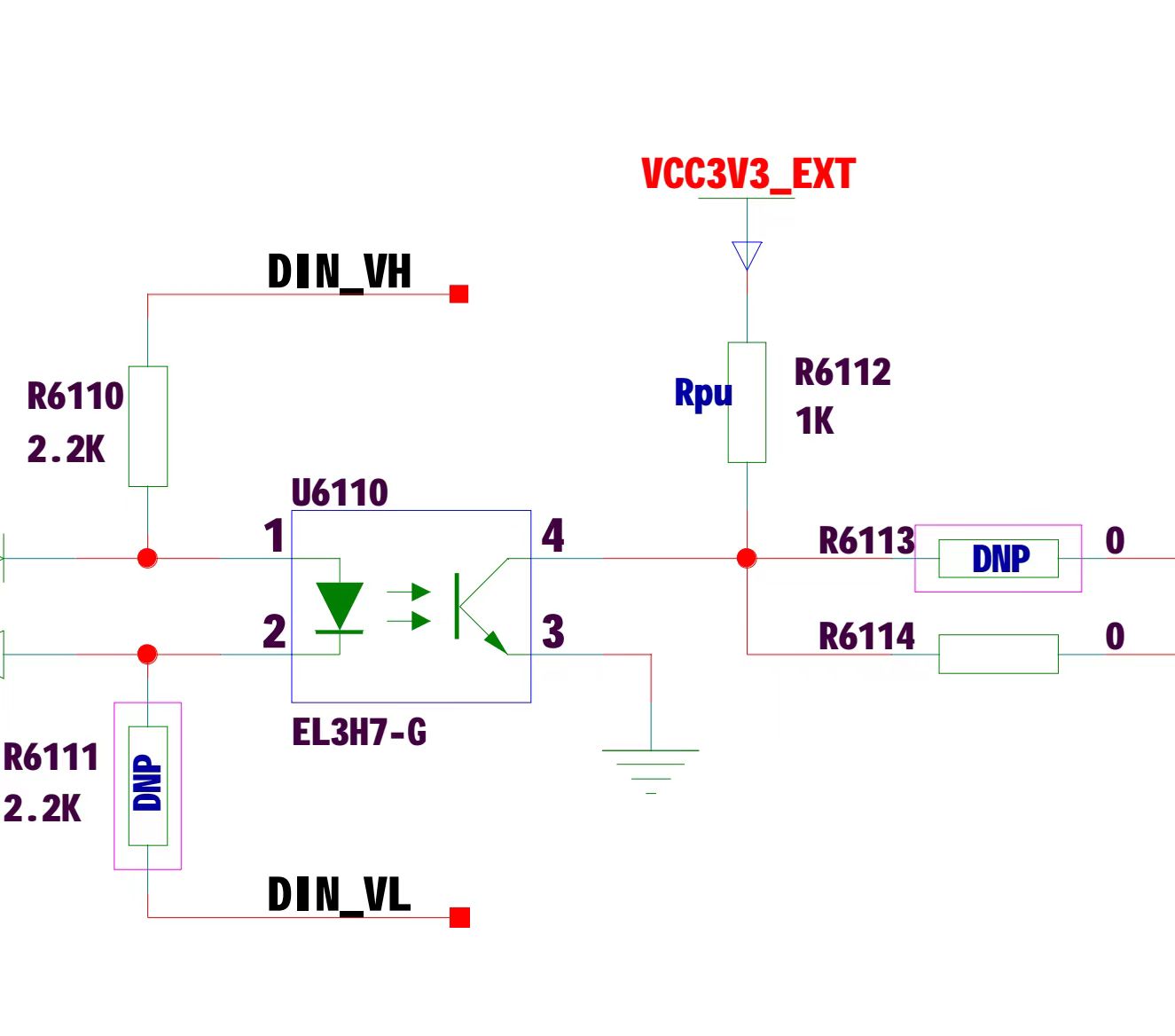
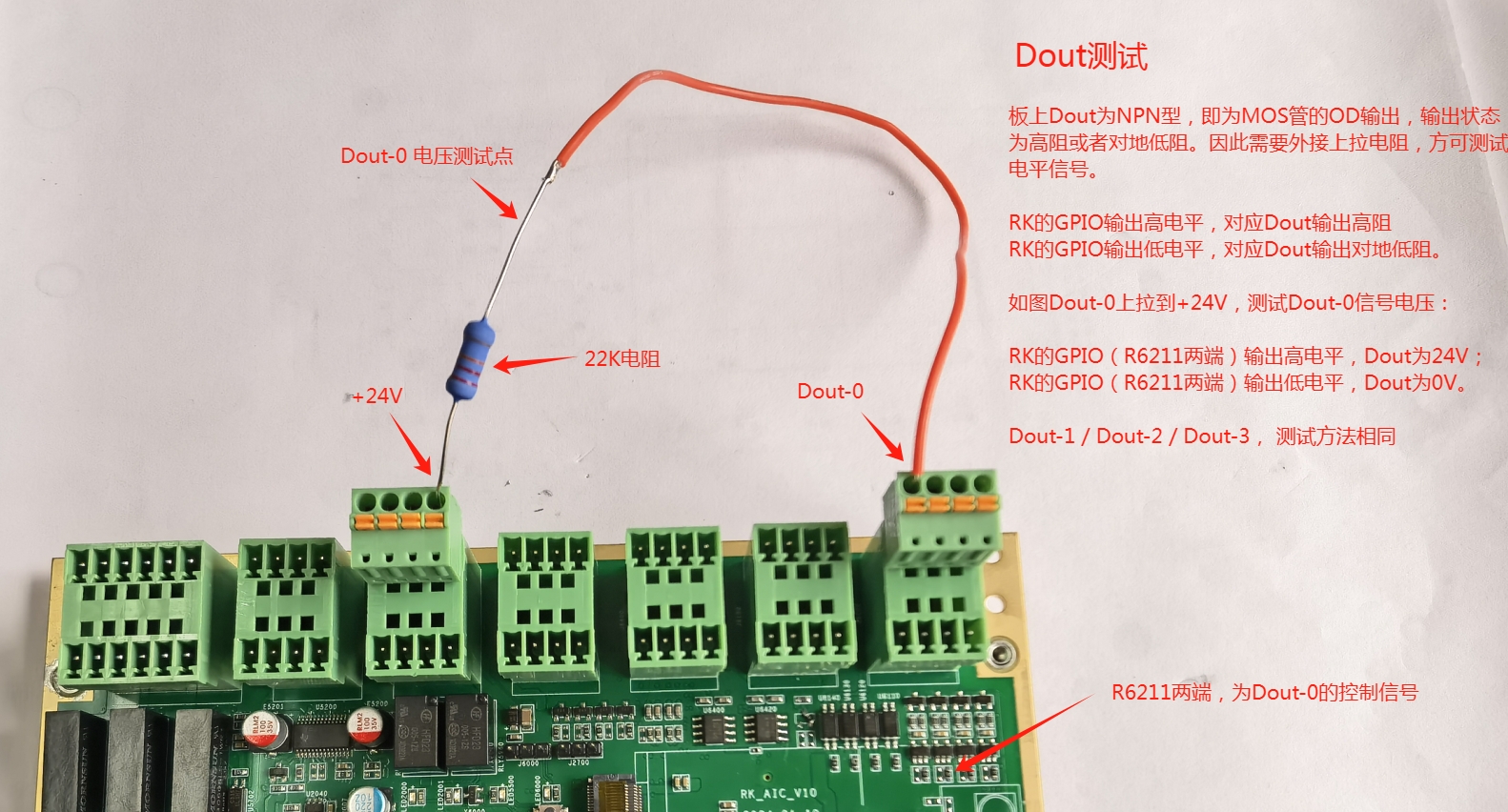
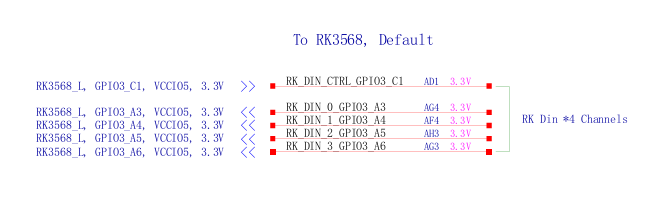
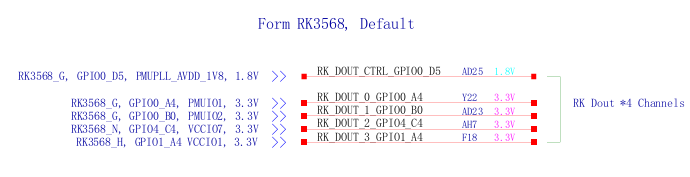
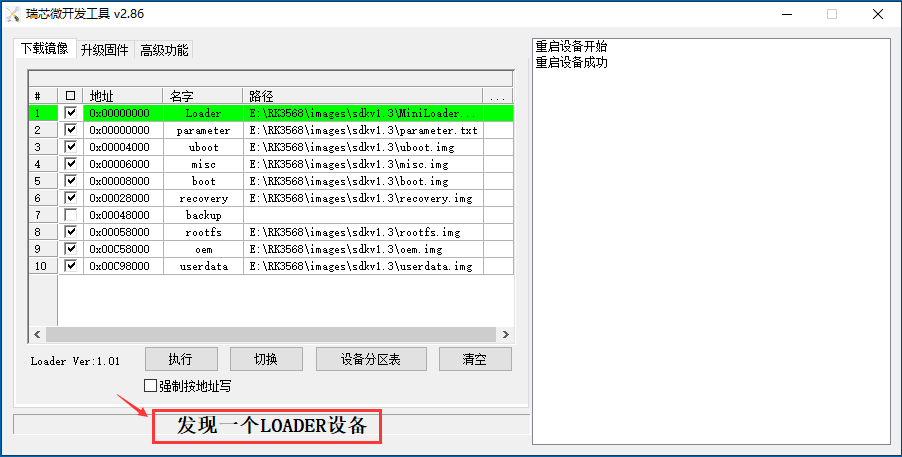
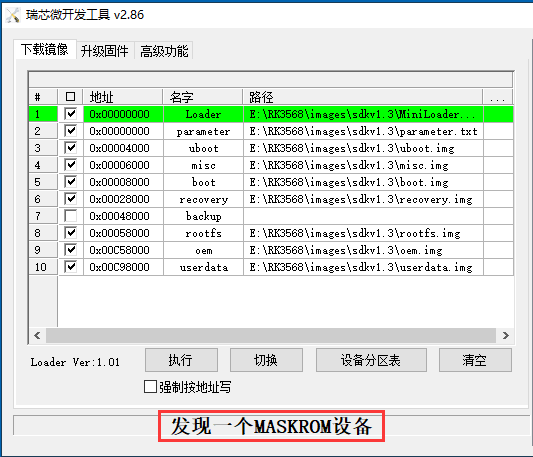
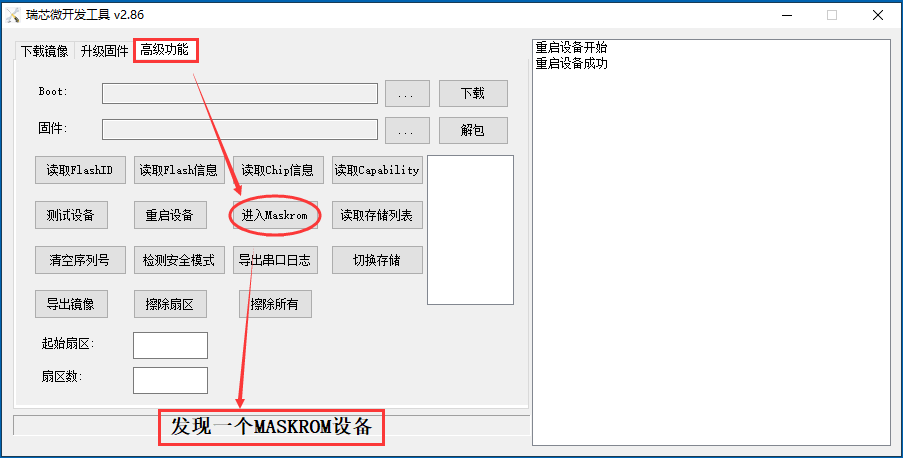
New file @@ -0,0 +1,842 @@ # 1. Rockchip Android 11.0 SDK代码下载编译 ## 1.1 下载压缩包 ``` wget http://192.168.0.2:2211/rockchip/android/android-11.0-mid-rkr12.tgz ``` ## 1.2 解压压缩包 ``` tar -xzvf android-11.0-mid-rkr12.tgz ``` ## 1.3. 代码编译 进入解压路径后,输入如下命令: ``` source build/envsetup.sh lunch rk3568_r-userdebug ./build.sh -AUCKu ``` 编译完成后,会在/rockdev/Image-rk3568_r目录下生成镜像文件,如图:  # 2. 系统烧录 ## 2.1 开发板烧录链接  * 使用 12V/1A 的电源给开发板供电; * 使用两端都是 TypeA接口的USB线连接开发板上的USB3.0接口到自己的PC上,该USB接口为系统烧录口; * 使用 TypeB 接口的USB线连接开发板上的 Console 调试串口到自己的PC上; * ***注: 开发板上电时,可以听到继电器上电后的咔嚓切换声音。*** ## 2.2 烧录软件下载 从凌云实验室文件服务器上下载并安装下面烧录软件。 * [CP210x_VCP_Windows.zip](http://studio.iot-yun.club:2211/rockchip/tools/CP210x_VCP_Windows.zip) 解压缩并安装开发板的Console调试串口驱动; * [DriverAssitant_v5.1.1.zip](http://studio.iot-yun.club:2211/rockchip/tools/DriverAssitant_v5.1.1.zip) , 解压缩安装RK3568开发板驱动; * [RKDevTool_Release_v2.86.zip](http://studio.iot-yun.club:2211/rockchip/tools/RKDevTool_Release_v2.86.zip) ,直接解压缩即可运行的 RK3568开发板烧录软件;  ## 2.3 固件烧写 打开RKDevTool工具  在下载镜像页面配置各个镜像文件及其烧录地址如下:  ### 2.3.1 按住 Maskrom 按键进入 如下图所示,将开发板上电后,按住 **S1300(Maskrom)按键** 同时,然后 **按下并释放 SW2100(Reset)按键** 将开发板重启,接下来 **再释放S1300按键**,这时候CPU将会进入到 **Maskrom模式**,在该模式下我们可以烧录或升级系统镜像。  下面是开发板上的各个按键说明: | 按键 | 作用 | 备注 | | ------ | -------------- | -------------------------------------- | | SW2101 | RK809_PWRON | 长按8秒左右关机,再按开机 | | S1300 | A核Maskrom按键 | 按住该键+复位键系统将进入到MASKROM模式 | | SW1501 | Recovery Key | 按住该键+复位键系统将进入到Loader模式 | | SW2100 | RESETN | A核复位按键 | | S6000 | M3核复位按键 | M核复位按键 | | S6001 | M3核ISP按键 | 按下复位M核将进入UART ISP模式 | 此时在 **RKDevTool.exe** 软件底行会显示 “**发现一个MASKROM设备**” 。 ### 2.3.2 按住 Recovery 按键进入 如下图所示,将开发板上电后,按住 **SW1501(Recovery)按键** 同时,然后 **按下并释放 SW2100(Reset)按键** 将开发板重启,**继续SW1501(Recovery)按键 8秒后释放**,这时候CPU将会进入到 **Loader 模式**,在该模式下我们可以烧录或升级系统镜像。  此时在 **RKDevTool.exe** 软件底行会显示 “**发现一个LOADER设备**”。 接下来切换到 “**高级功能**” 菜单下,并点击 “**进入Maskrom**” 按钮,这时候将会切换到 “**Maskrom**” 模式。  ## 2.4 系统烧录与启动 在 **RKDevTool.exe** 烧录软件上,确认设备已经进入到 Maskrom模式后,点击上面的 **“执行”** 按钮。   **(注意:当系统烧录完后,切勿拔掉USB3.0烧录口,不然后面开发板启动会报错!!!)** **一拔掉烧录线就卡死的现象的解决方案见 7.Android 永不息屏和关闭锁屏** 烧录完成第一次启动后,系统将会自动初始化。初始化完成之后将会再次重启,此时可以使用 Console 串口上登录到开发板的 Android11系统中去。  注意:在系统启动时会弹出类似于: ``` [ 31.545394] type=1400 audit(1712609351.273:45): avc: denied { read } for comm="Binder:190_2" name="wakeup4" dev="sysfs" ino=23884 scontext=u:r:system_suspend:s0 tcontext=u:object_r:sysfs:s0 tclass=dir permissive=1 [ 31.545632] type=1400 audit(1712609351.273:46): avc: denied { open } for comm="Binder:190_2" path="/sys/devices/platform/fe6e0030.pwm/wakeup/wakeup4" dev="sysfs" ino=23884 scontext=u:r:system_suspend:s0 tcontext=u:object_r:sysfs:s0 tclass=dir permissive=1 [ 31.545831] type=1400 audit(1712609351.273:47): avc: denied { read } for comm="Binder:190_2" name="event_count" dev="sysfs" ino=23891 scontext=u:r:system_suspend:s0 tcontext=u:object_r:sysfs:s0 tclass=file permissive=1 [ 31.546114] type=1400 audit(1712609351.273:48): avc: denied { open } for comm="Binder:190_2" path="/sys/devices/platform/fe6e00t" dev="sysfs" ino=23891 scontext=u:r:system_suspend:s0 tcontext546228] type=1400 audit(1712609351.273:49): avc: denied { getattwakeup/wakeup4/event_count" dev="sysfs" ino=23891 scontext=u:r:s1 ``` 此时需要输入命令`su`,切换到root用户,既不会弹出。 # 3. 外设调试与测试 ## 3.1 系统心跳灯 ### 3.1.1 内核修改支持 DTS文件修改(默认已经添加节点) leds: leds { compatible = "gpio-leds"; work_led: work { gpios = <&gpio0 RK_PC0 GPIO_ACTIVE_HIGH>; linux,default-trigger = "heartbeat"; status = “okay” }; }; 内核make menuconfig配置(默认已使能) ``` Device Drivers -> LED Support -> LED Support for GPIO connected LEDs ``` ``` Device Drivers -> LED Support -> LED Trigger support -> LED Heartbeat Trigger ``` ### 3.1.2 应用程序测试 设置好config之后重新编译内核并烧到开发板中,当系统启动时就会看到蓝色led灯闪烁。 ## 3.2 RGB灯和蜂鸣器扩展接口 ### 3.2.1 内核修改支持 原理图及分析  这里的测试只要就是对这些gpio进行配置即可,利用gpioset来控制高低电平 **注意:这四个gpio在设备树中可能会被其他设备所占用,导致不能操作gpio,所以要查看哪些设备占用着这几个gpio需要屏蔽掉这些设备。** ### 3.2.2 应用程序测试 由于这四个引脚都是用MOS管控制的开漏输出,所以我们需要去测试MOS管的栅极看看是否是3.3V电平 **规则:** **GPIO输出1的时候,对应的栅极是0V** **GPIO输出0的时候,对应的栅极是3.3V** ```c gpioset 0 18=1/0 gpioset 0 20=1/0 gpioset 0 22=1/0 gpioset 3 21=1/0 ``` 利用万用表,将万用表调到直流电压20V这一档,这四个模块对应的三极管如下图所示,利用gpioset来控制四个gpio的高低电平,看看是否符合上述规则。  ## 3.3 RTC芯片 ### 3.3.1 内核修改支持 内核make menuconfig配置 默认已使能 ``` Device Drivers -> Real Time Clock -> Rockchip RK805/RK808/RK809/RK816/RK817/RK818 RTC -> ``` ### 3.3.2 应用程序测试 输入命令: ``` date -s "2024-04-01 11:40:00" ```  设置完成后再次使用`date`命令查看一下当前时间就会发现时间改过来了 大家注意我们使用`date -s`命令仅仅是修改了当前时间,此时间还没有写入到RK809内部 RTC 里面或其他的 RTC 芯片里面,因此系统重启以后时间又会丢失。我们需要将当前的时间写入到 RTC 里面,这里要用到`hwclock` 命令,输入如下命令将系统时间写入到 RTC 里面: ``` hwclock -w /将当前系统时间写入RTC里面/ ``` 时间写入到 RTC 里面以后就不怕系统重启以后时间丢失了 间隔时间输入如下命令: ``` hwclock -r /读取当前系统时间/ ```  发现当前系统时间在走动,系统时间正常。 ## 3.4 RS232和RS485 ### 3.4.1 内核修改支持 RS232 DTS文件修改 ```c &uart3{ dma-names = "tx", "rx"; pinctrl-names = "default"; pinctrl-0 = <&uart3m1_xfer>; status = "okay"; }; &uart4{ dma-names = "tx", "rx"; pinctrl-names = "default"; pinctrl-0 = <&uart4m1_xfer>; status = "okay"; }; ``` RS485 DTS文件修改 ```c &uart9 { pinctrl-names = "default"; pinctrl-0 = <&uart9m1_xfer &rs485_ctrl>; status = "okay"; }; //在rk3568-pinctrl.dtsi下加入 rs485 { rs485_ctrl: rs485-ctrl { rockchip,pins = <4 RK_PD2 RK_FUNC_GPIO &pcfg_output_low>; }; }; ``` 因为RS485是半双工的,所以要么先测接收功能要么测发送功能,从原理图上可以看到,接受与发送功能的切换是GPIO4_D2来控制的,默认情况是接收功能,我们可以利用gpioset命令拉高该gpio让其工作在发送模式 ### 3.4.2 应用程序测试 RS232测试 在/dev目录下的ttyS3和ttyS4为两路RS232设备,使用microcom 命令可以操作232串口。具体测试如下 将两个232设备的RX和TX口用杜邦线进行连接,如下图所示  连接好之后我们在设备1和设备2上均输入 ```c microcom /dev/ttyS3 -s 115200 ``` 测试结果   由于microcom没有回显,所以看不到自己发送的是什么,但是接受的结果是没错的 RS485测试接受功能 如图所示,利用TTL转RS485模块来作为另外一台RS485设备,连线如下图所示   RS485测试发送功能 将控制引脚拉高电平,输入如下命令 ```c gpioset 4 28=1 ```  ## 3.5 CAN总线 ### 3.5.1 内核修改支持 DTS文件修改 ```c &can0 { compatible = "rockchip,can-1.0"; assigned-clocks = <&cru CLK_CAN0>; assigned-clock-rates = <150000000>; pinctrl-names = "default"; pinctrl-0 = <&can0m1_pins>; status = "okay"; }; &can1 { compatible = "rockchip,can-1.0"; assigned-clocks = <&cru CLK_CAN1>; assigned-clock-rates = <150000000>; pinctrl-names = "default"; pinctrl-0 = <&can1m1_pins>; status = "okay"; }; ``` 内核make menuconfig配置 ``` Networking support -> CAN bus subsystem support -> CAN Device Drivers -> Platform CAN drivers with Netlink support -> ``` ### 3.5.2 应用程序测试 我们可以用ifconfig -a来查看can的数量,如下图所示  这里我们测试can1的收发功能,can0与之完全相同 首先我们将两个can设备利用杜邦线进行连接,连接如下图所示  连接好之后,我们需要对can1进行配置,利用ip命令 ```c ip link set can1 down //关闭 can 网络 ip link set can1 up type can bitrate 800000 //设置 can1 的波特率为 800kbps,can 网络波特率最大值为 1mbps ip link set can1 up type can //打开 can 网络 ``` 设置好之后,我们上图所示中的设备1作为接受方,设备2作为发送方 注意:因为Android上没有can的相关命令,所以需要去网上下载适配Android系统的canutils工具源码,然后使用安卓编译系统编译源码,具体步骤 1. 下载解压canutils,将canutils放在/home/android/rk3568/android11/external目录下 2. 回到/home/android/rk3568/android11目录使用如下命令配置好编译系统环境 ``` source build/envsetup.sh lunch rk3568_r-userdebug ``` 3. 在进入/home/android/rk3568/android11/external/canutils目录下,输入mm,即可自动编译源码  4. 最后可执行文件都会安装到 /home/android/rk3568/android11/out/target/product/rk3568_r/system/bin (ps. 其实我们可以将这个canutils的编译放进整个的安卓编译系统,这样我们编译安卓源码的时候就可以自动编译canutils,这样我们烧录镜像后会发现,系统出厂自带了canutils,这个步骤可以借鉴网上博客) 5. 我们使用adb命令可以将我们需要的candump和cansend程序传到我们开发版的/system/bin目录下,授予执行权限后就可以使用了 在设备1上输入 ```c candump can1 ``` 在设备2上输入 ```c cansend can1 0x11 0x22 0x33 0x44 0x55 0x66 0x77 0x88 ``` 结果如图所示   ## 3.6 声卡Codec ### 3.6.1 内核修改支持 原理图及分析   ### 3.6.2 应用程序测试 先将模式切换成输出模式,默认是高电平静音模式 ``` gpioset 3 19=0 或者 echo "out" > /sys/class/gpio/gpio115/direction echo 0 > /sys/class/gpio/gpio115/value ``` 当听到喇叭发出“砰”的一声就说明可以了 J5950端子上部为音频功放输出端口 实物图连接:  因为Android11集成的声卡设置和linux下不同,所以命令不同 Android使用的是toybox下的tinyalsa工具 使用方法可参考[如何查看声卡、pcm设备以及tinyplay、tinymix、tinycap的使用-CSDN博客](https://blog.csdn.net/luyao3038/article/details/121859072) 设备树加入use-ext-amplifier后可支持外部扬声器播放音乐  设置输出方式为耳机输出(HP) ``` tinymix 0 HP ```  用adb命令将.wav音乐传到开发板上,播放音乐 ``` tinyplay ./music.wav ``` 设置输出方式为扬声器输出(SPK) ``` tinymix 0 SPK ``` 同样可以输出 ## 3.7 4G模块 ### 3.7.1 应用程序测试 **开机方式** 首先操作GPIO,给4G模块上电 **(注意:开关机按键,复位按键,在开发板上是MPU的GPIO出来后,硬件做了反向的。低电平,上电 低脉冲,复位)** 输入如下命令 ``` gpioset 3 0=0 gpioset 3 1=0 ``` 将这两个引脚拉低后,模块上电如下所示  **关机方式** 1. 软件方式关机 先发送AT+QPOWD命令给模块,再拉高引脚 ``` microcom /dev/ttyUSB3 -s 115200 AT+QPOWD ``` 按住Ctrl+x,再输入如下命令 ``` gpioset 3 1=1 ``` **(注意:在发送AT命令后需要在几秒内拉高gpio引脚,否则模块会再次开启)**  2. 硬件方式关机 先拉低RESET大于100ms后,拉低电源引脚Power_on 硬件关机时序如下图所示:  当4G模块上电后,可以在dev目录下看到四个ttyUSB设备  我们可以使用microcom命令对串口发送AT命令 ```c microcom /dev/ttyUSB3 -s 115200 ```  检测手机卡是否在位 AT+CPIN?  网络运行商名称 AT+COPS?  CHN-CT 表示中国电信 网络注册状态 AT+CREG?  第二个参数为0 表示没有注册网络,为1表示网络已注册 信号强度 AT+CSQ  数值越大表明信号质量越好; **注意:如果在linux系统下对EM05设置成了ECM模式,那上电后会自动进入ECM模式,如果有,跳过下面的ECM模式拨号上网切换过程** **ECM模式拨号上网** 当我们上电4G模块之后,我们发送如下AT命令切换模块的工作模式为ECM ``` microcom /dev/ttyUSB3 -s 115200 AT+QCFG="usbnet",1 ``` **当我们将EM05配置成ECM模式后,在Linux下就可以直接获取ip地址,直接上网了,但是在Android系统下不会有这些服务,解决方法见 5. Android 出现4G模块无法上网问题** ## 3.8 DIO测试 ### 3.8.1 硬件原理图说明     ### 3.8.2 Din测试  按照上图的说明方法,将Din-0短接GND,此时Din-0输出低电平,测量R6114两侧的电压值,红表笔接一侧,黑笔接地。此时可以发现万用表显示电压为0.17v左右。其他的三个Din均是相同的方法。 **注意:为什么不是0V而是0.17v的微弱电压?** **因为从下图可以看出光耦内置三极管的CE结,饱合导通时会存在一定的压降,这个0.17v即为压降。**  ### 3.8.3 Dout测试  如上图所示连接好电路,以Dout-0为例说明,其他的Dout的测试方法均相同 输入`gpioset 0 4=0`,使gpio输出为低电平,用万用表测试R6211两端的电压正常情况均为0v。 输入`gpioset 0 4=1`,使gpio输出为高电平,用万用表测试R6211两端的电压正常情况均为3.3v。 **注意:在RK3568上如果某个gpio没有被复用,默认情况下该引脚的模式是gpio模式,但是此处的GPIO0_PA4例外,所以需要在设备树中特殊配置一下该引脚使用gpio模式。**  ### 3.8.4 Dout/ Din 联合测试  如上图所示将Din与Dout连接好,通过改变Dout的输出电平,检测Din是否收到对应的电平,以Din-0和Dout-0为例说明 输入`gpioset 0 4=0` `gpioget 3 3`,显示Din-0的电平应为0 输入`gpioset 0 4=1` `gpioget 3 3`,显示Din-0的电平应为1 # 4. ADB调试工具 1. 下载解压platform-tools-latest-windows.zip  2. 添加环境变量 将解压的文件夹的目录位置添加到环境变量Path下  3. 打开cmd窗口,输入adb命令  上面表示adb安装成功! **如果遇到问题无法使用,或者提示找不到adb命令,把解压出来的文件夹里的adb.exe文件复制到C:\Windows\SysWOW64** 4. 上传文件到开发版的Android系统 (1)把开发板的串口线接到PC端后,输入`adb root`获取权限  (2)重新挂载根文件系统,输入`adb remount`重新挂载  (3)将windows文件上传到开发板系统,利用`adb push`命令上传文件 例如我需要将windows下E:\music.wav文件上传到开发板的/sdcard/Music下 `adb push E:\music.wav /sdcard/Musci`   # 5. Android 出现4G模块无法上网问题 背景:出现这个问题之前,4G模块EM05在Linux系统可以通过ECM模式上网,但是到了Android系统发现usb0网络无法获取到IP地址,从而无法上网。 解决方法: Android系统带的RIL机制,Android RIL提供了Android电话服务和无线电硬件之间的抽象层。 在Windows和Linux系统下会有后台进程帮我们自动获取IP,只需要我们把模块设置成ECM模式就可以了,但是Android下没有这个服务。在Android系统下存在一个rild_damon这个守护进程,RILD(RIL Daemon)是系统的守护进程,系统已启动,就会一直运行。手机开机时,kernel完成初始化后,Android启动一个初始化进程Init用于加载系统基础服务,如文件系统,zygote进程,服务管家ServiceManager,以及RILD 在/home/android/rk3568/android11/hardware/ril/rild下存在一个rild.rc文件,在这个文件中配置了rild_damon这个服务,也是解决这个问题的关键。 1. 获取移远公司提供的libreference-ril.so , 在系统执行rild可执行文件的时候会链接到这个动态库 2. 将libreference-ril.so添到/home/android/rk3568/android11/vendor/rockchip/common/phone/lib目录下,并重命名为libreference-ril-em05.so  3. 修改/home/android/rk3568/android11/vendor/rockchip/common/phone/phone.mk  (这里添加这个动态库的目的是让最后生成的根文件系统里的/vendor/lib64/下存在libreference-ril-em05.so,如果不存在这个动态库,rild_daemon守护进程会一直打印退出重启信息,直到/vendor/lib64/下存在该动态库) 4. 修改/home/android/rk3568/android11/hardware/ril/rild/rild.rc  (从第一行可以看到,在启动ril-daemon这个服务的时候,系统会调用/vendor/bin/hw/rild程序,该程序需要链接到动态库) 修改好上面内容后,重新编译,烧录新的镜像到开发板中 测试结果: 1. 将EM05上电(上电流程参考linux系统) 2. 上电后会出现如下信息  (中间的denied信息是由于SELinux下权限问题,暂时先不用管) 我们通过`ifconfig usb0`查看usb0的信息  通过`ping www.baidu.com`测试上网功能  # 6. Android系统修改硬件设备访问权限 背景:在使用Android Studio工具实现屏幕按键控制三色灯亮灭的时候,未获得权限导致不能打开/dev/gpiochip* 在硬件抽象层模块文件(so)文件中,提供的函数调用open函数来打开设备文件,比如/dev/gpio,如果不修改设备文件/dev/gpio的访问权限,那么应用程序通过JNI接口来调用硬件抽象层提供的函数接口来调用open函数打开设备文件就会失败,这表示当前用户没有权限打开设备文件/dev/gpio文件。在默认情况下,只有root用户才有权限访问系统的设备文件,由于一般的应用程序没有root权限的。 为了解决上面的问题,需要为用户赋予访问设备文件/dev/gpio的权限。在linux系统中,可通过udev规则在系统启动时修改设备文件的访问权限,但在Android系统中没有实现udev规则,而是提供uevent机制,可以在系统启动时修改设备文件的访问权限 修改步骤 1. 关闭SELinux(如果已经关闭可跳过) device/rockchip/common  2. `vim /system/core/rootdir/uevent.rc` 添加如下内容  重新编译Android镜像 启动后查看是否修改成功  # 7. Android 永不息屏和关闭锁屏 永不息屏 \android11\device\rockchip\rk356x\overlay\frameworks\base\packages\SettingsProvider\res\values\defaults.xml 在这个文件中修改  “2147483647”表示永不息屏 关闭锁屏 \android11\frameworks\base\packages\SettingsProvider\res\values\defaults.xml 在这个文件下修改  修改后重新编译和烧录镜像。 documents/docs/RK3568_Android_SDK开发文档/images/4g-13.png
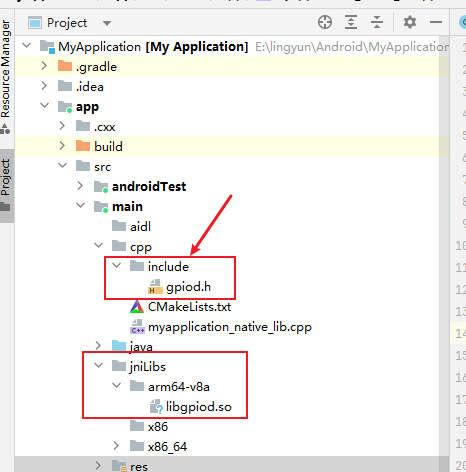
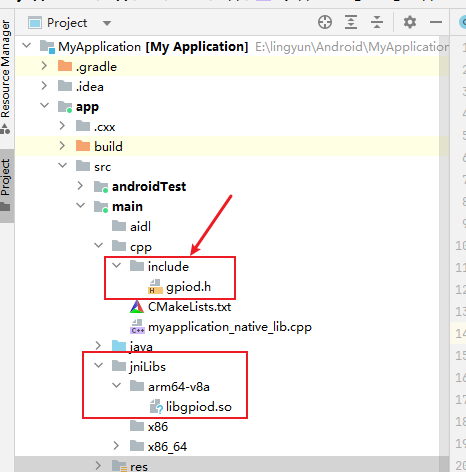
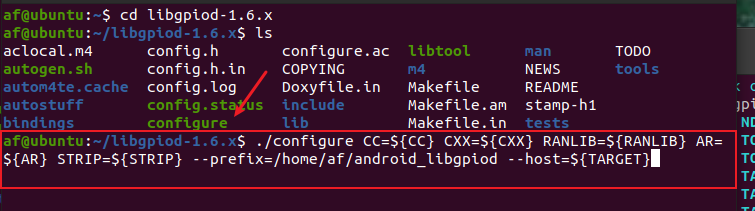
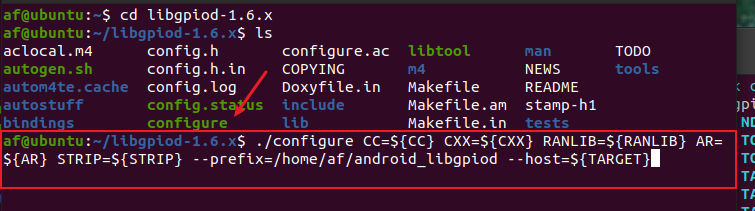
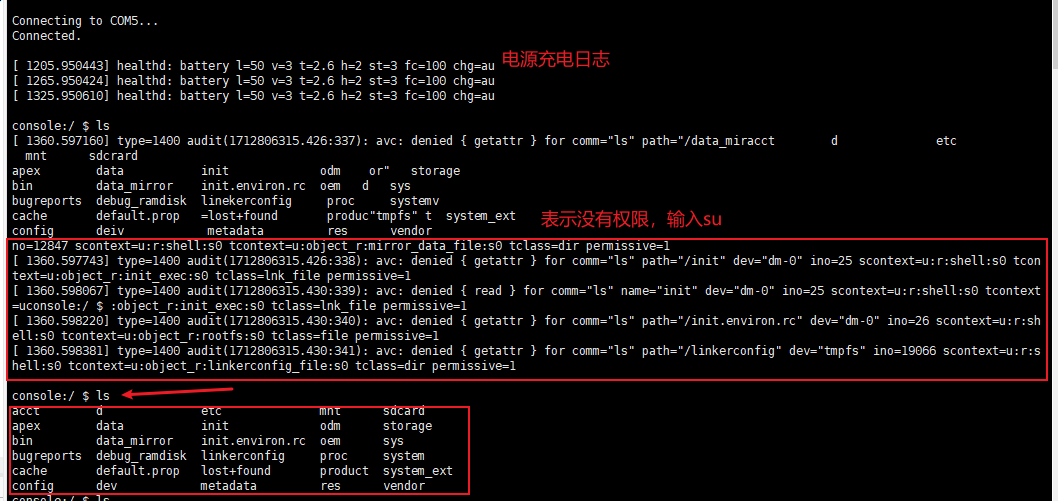
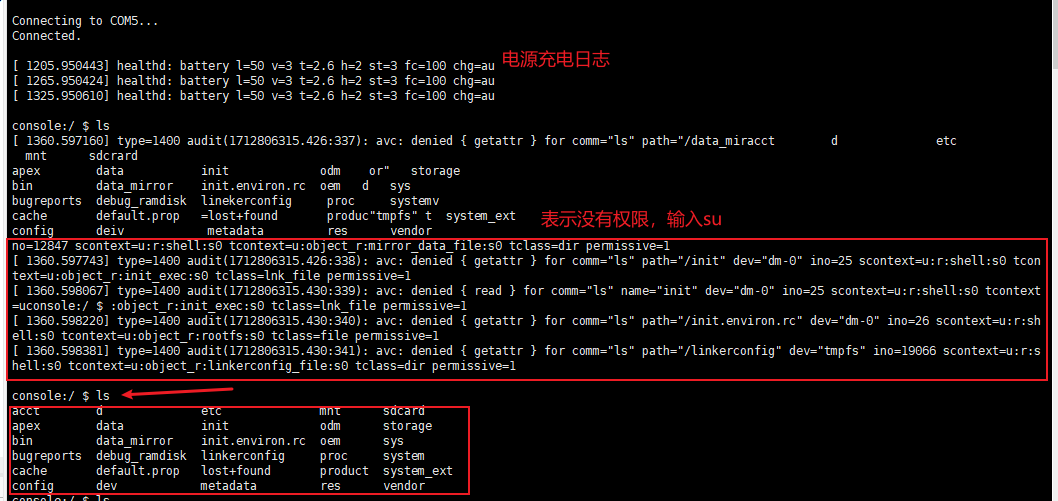
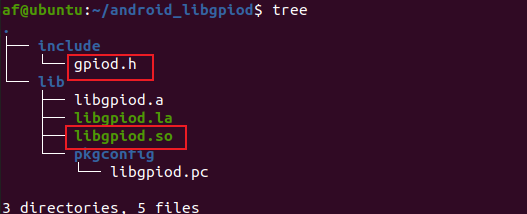
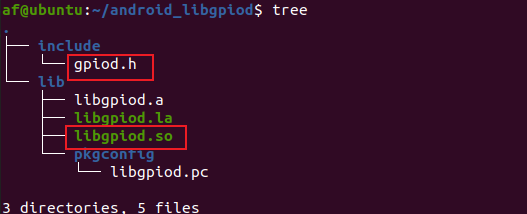
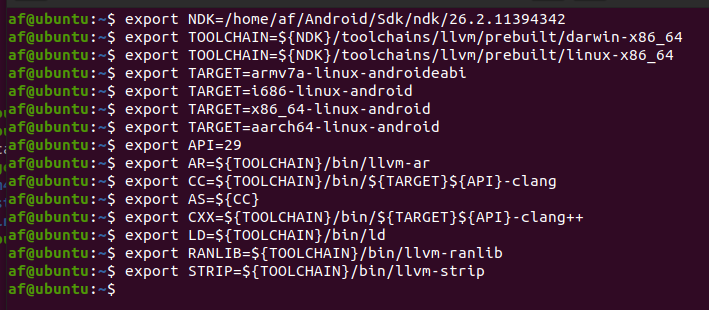
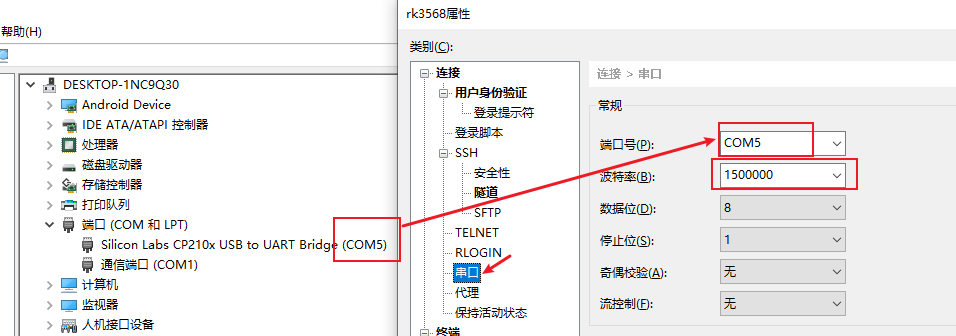
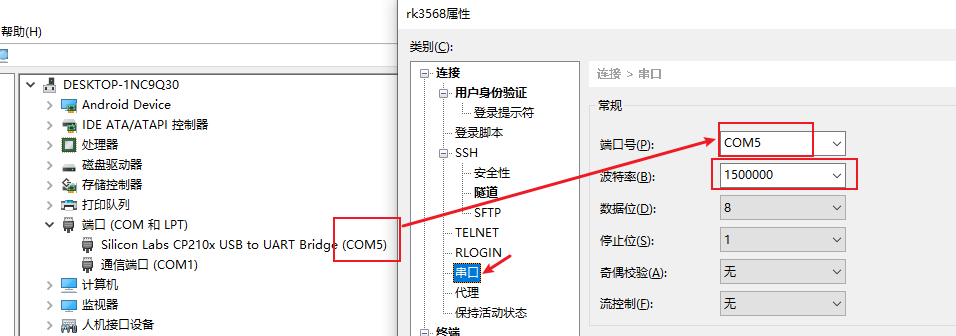
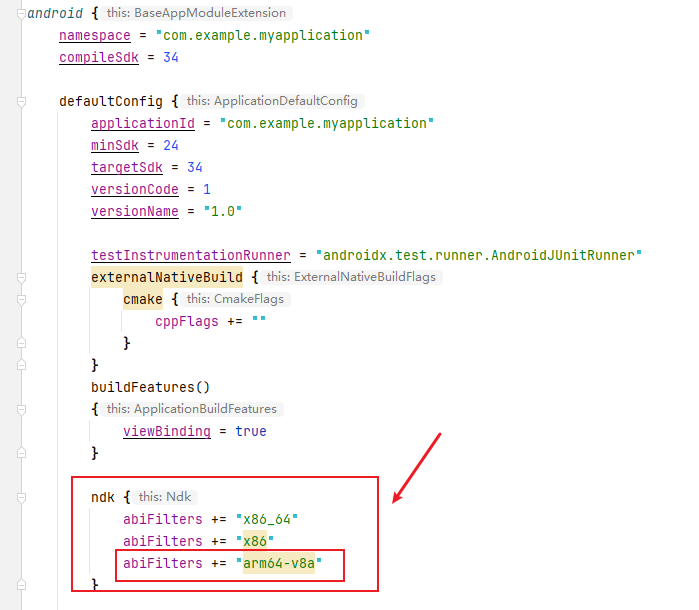
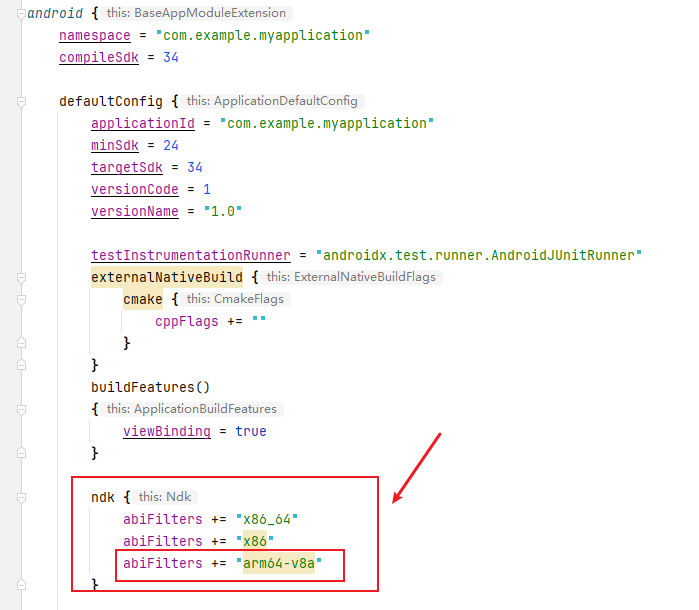
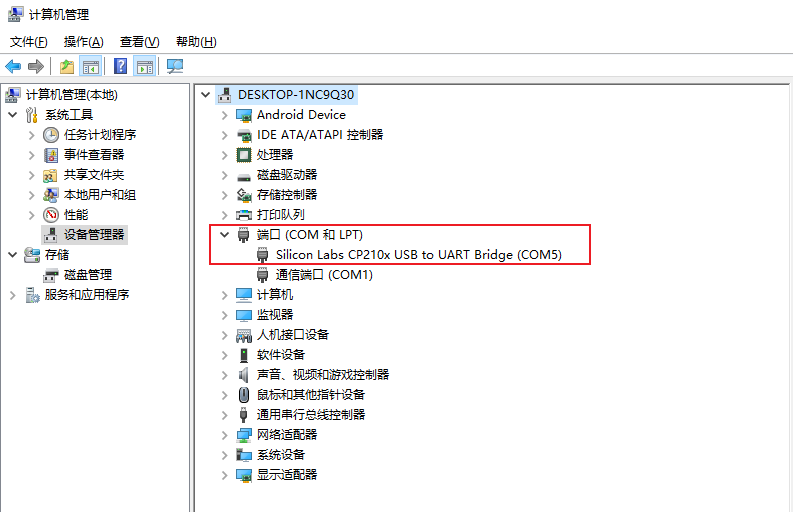
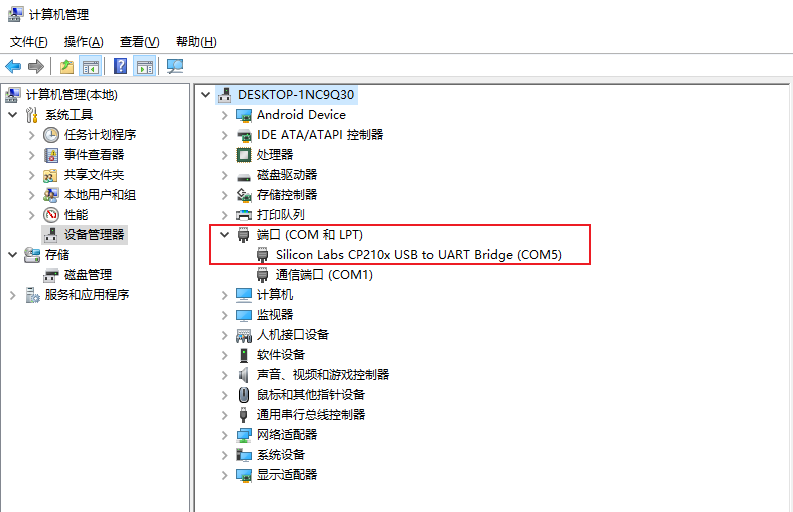
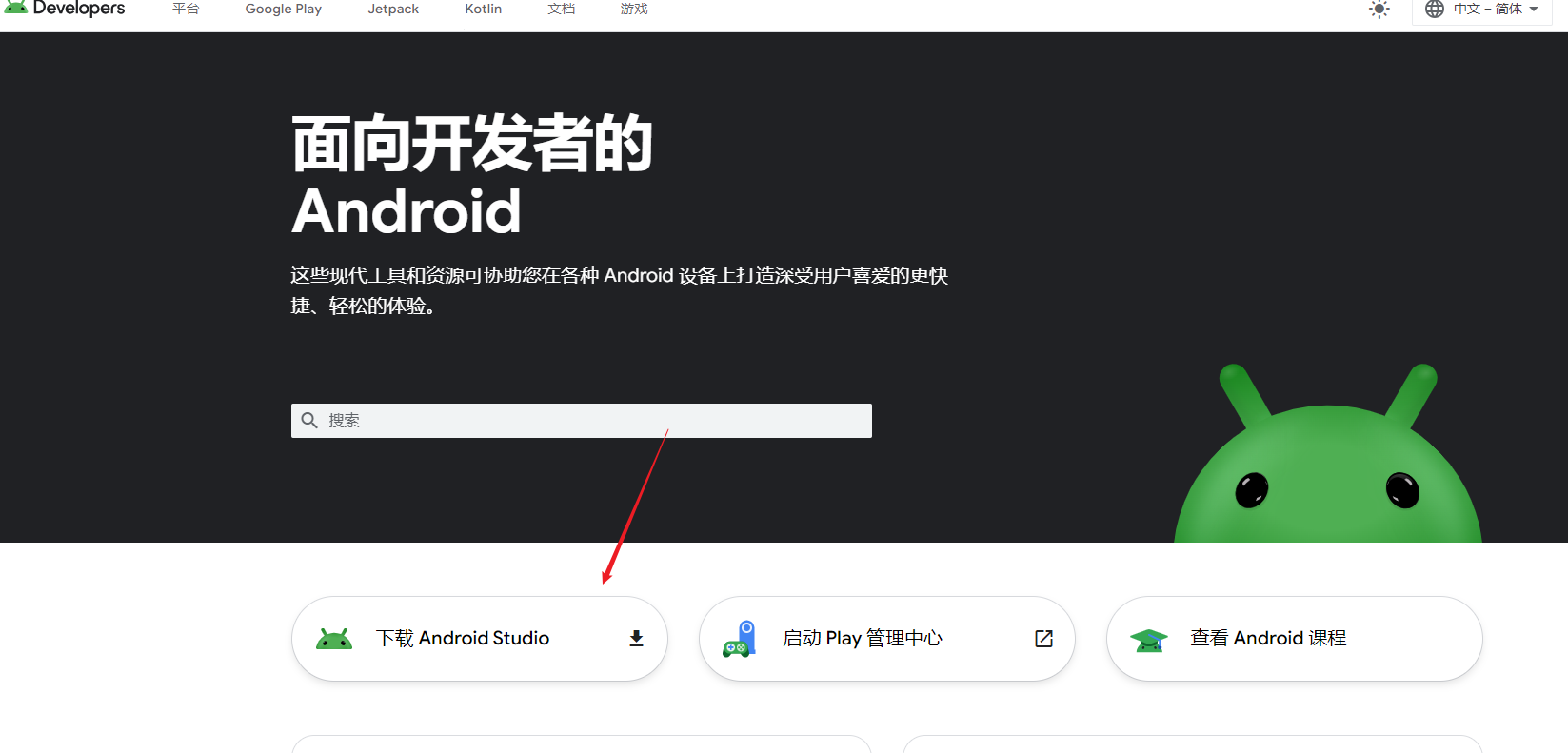
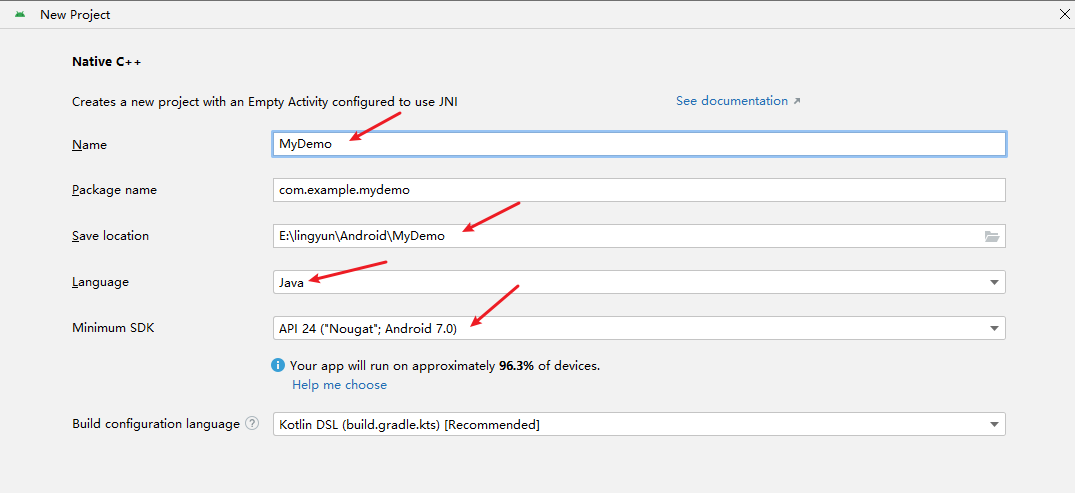
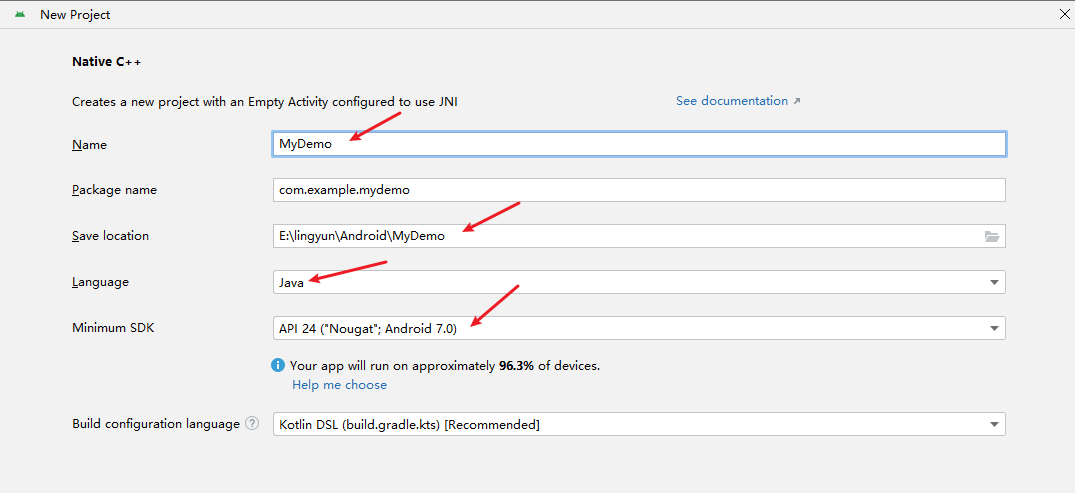
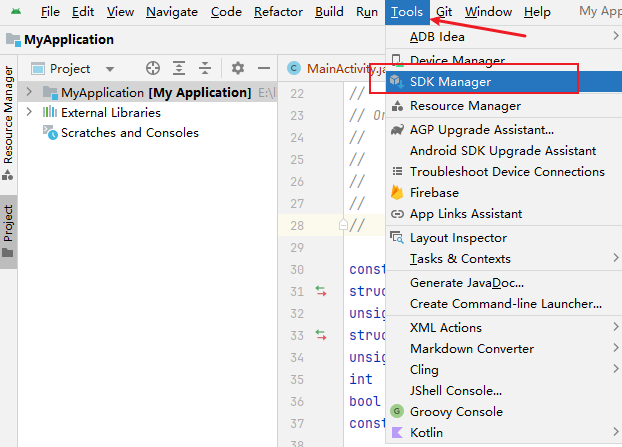
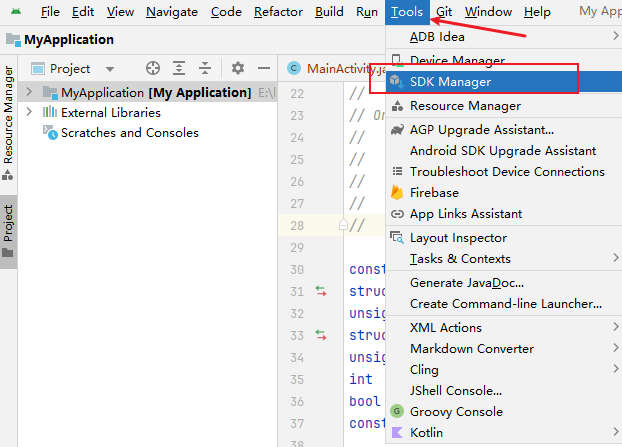
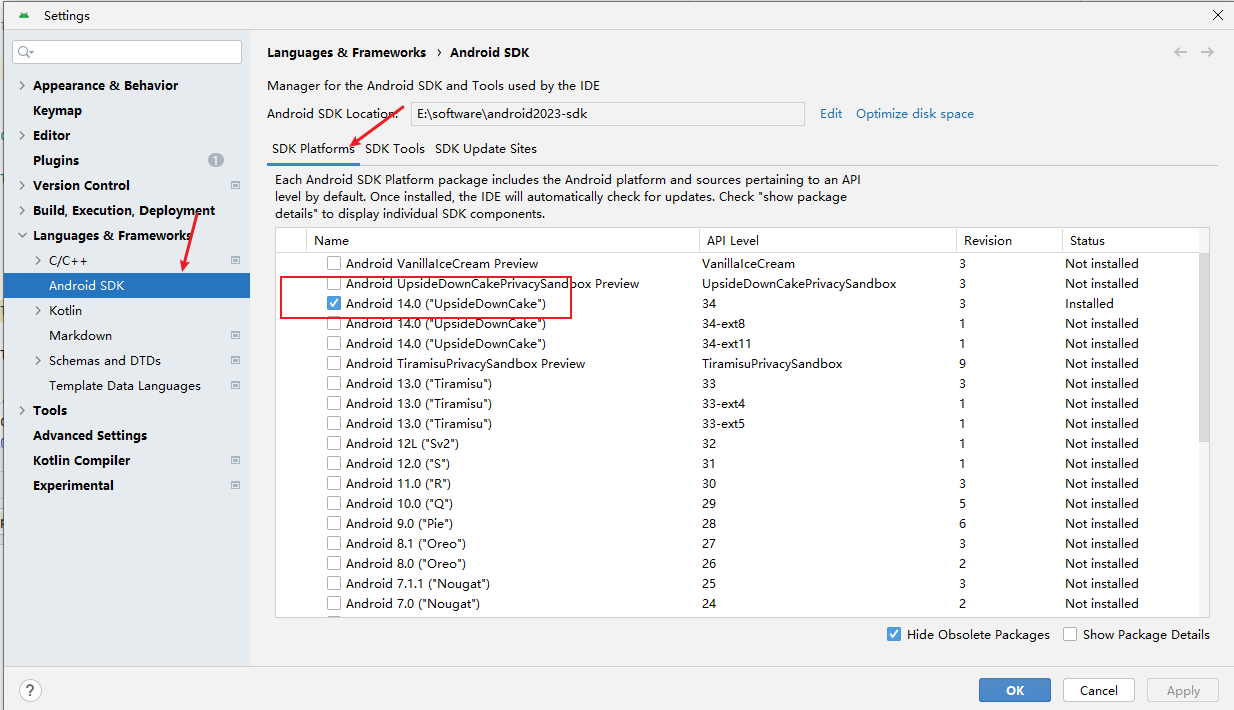
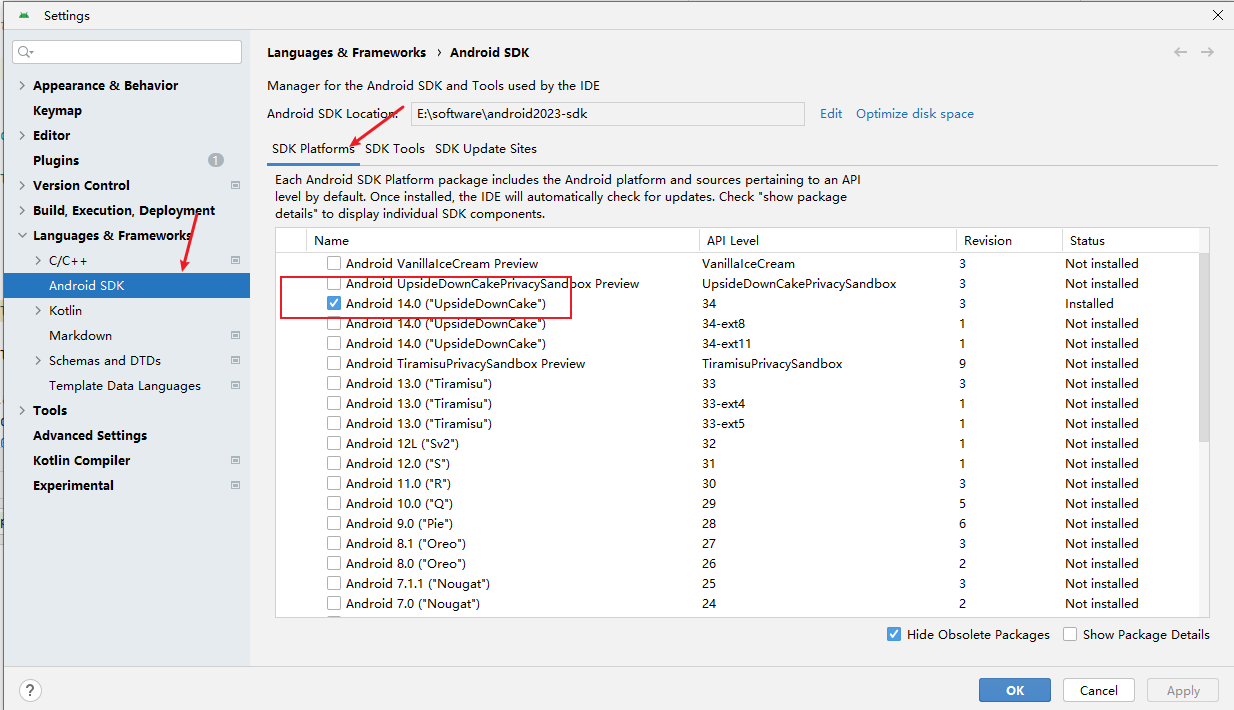
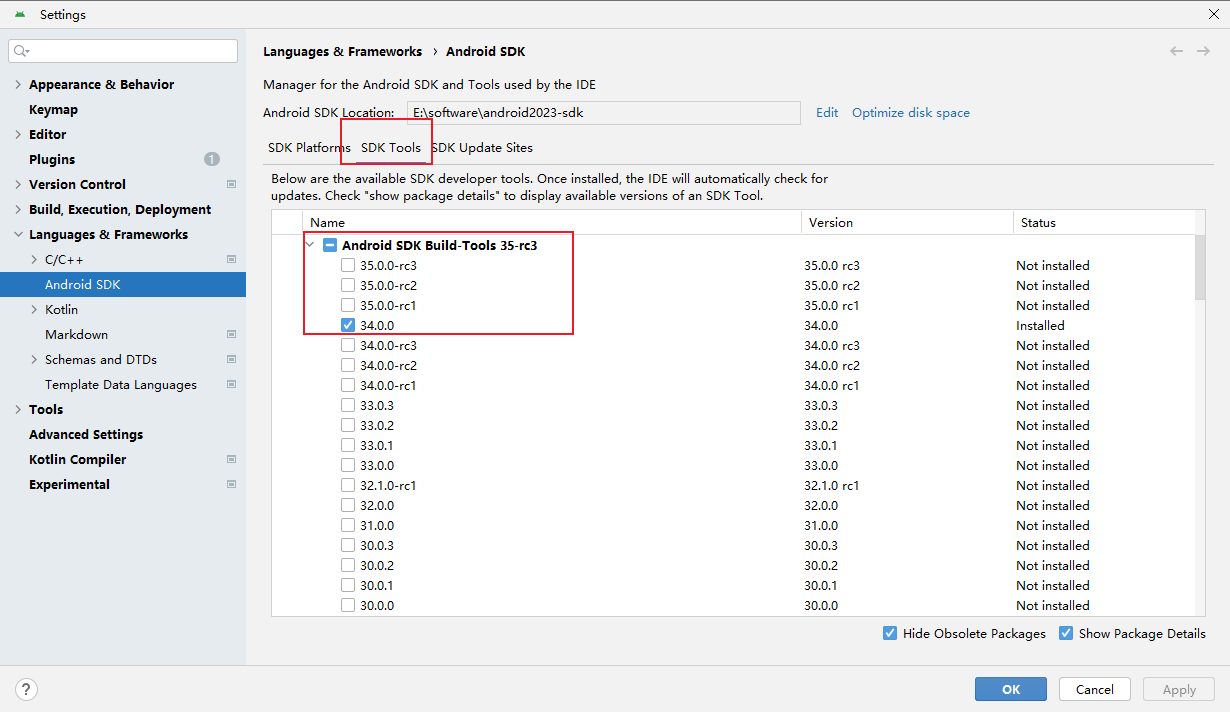
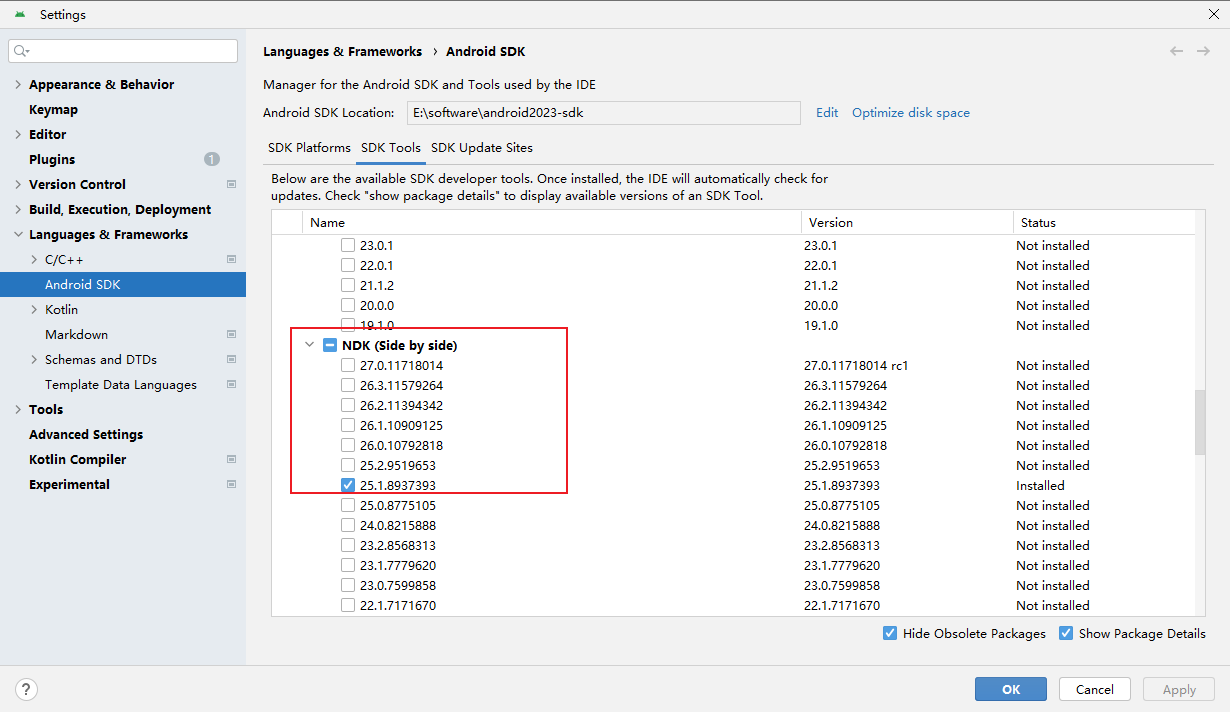
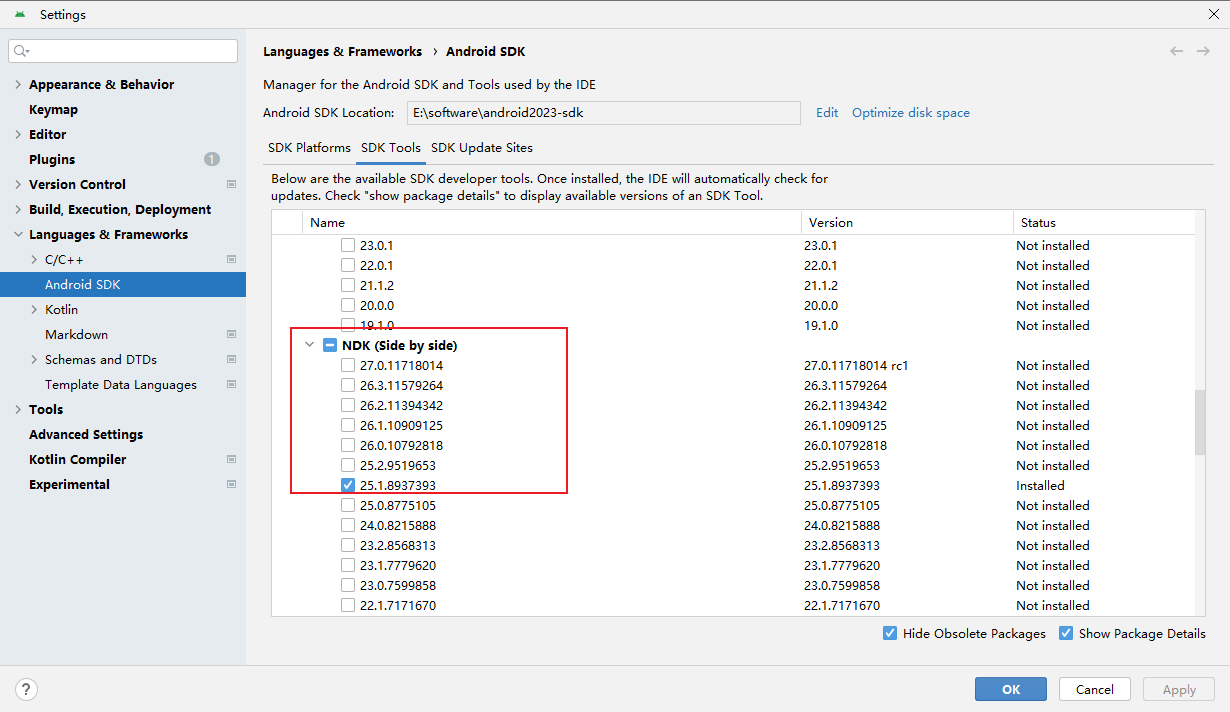
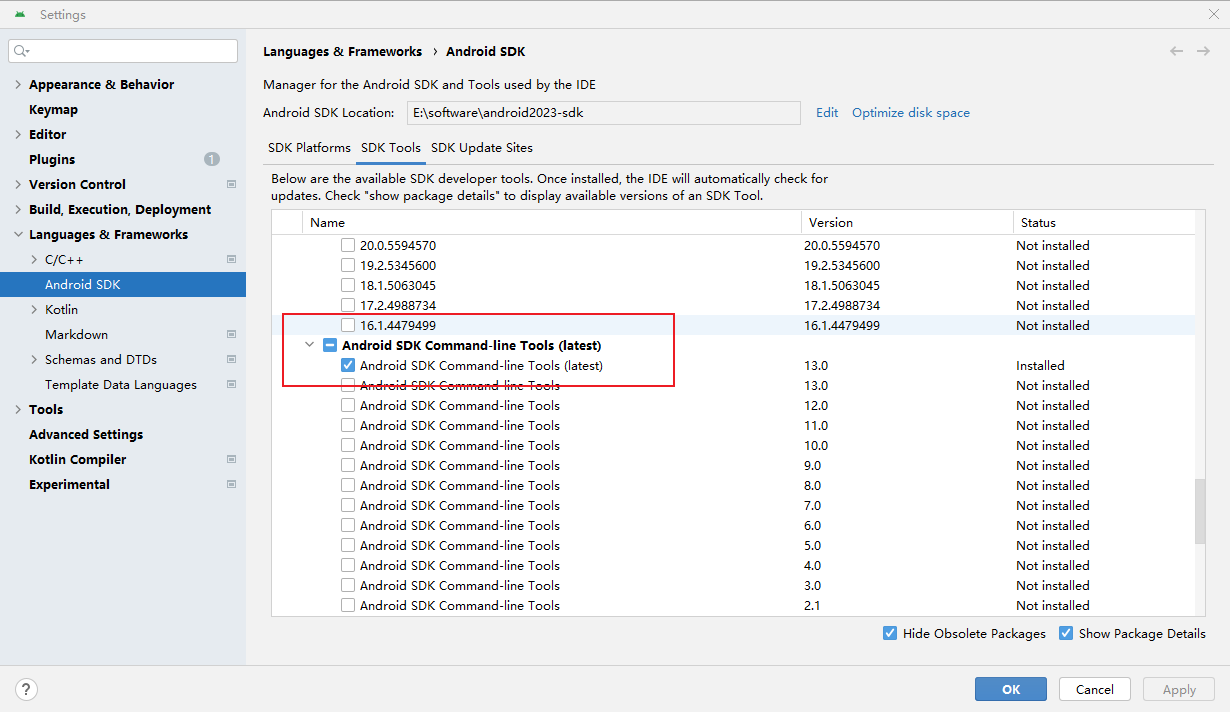
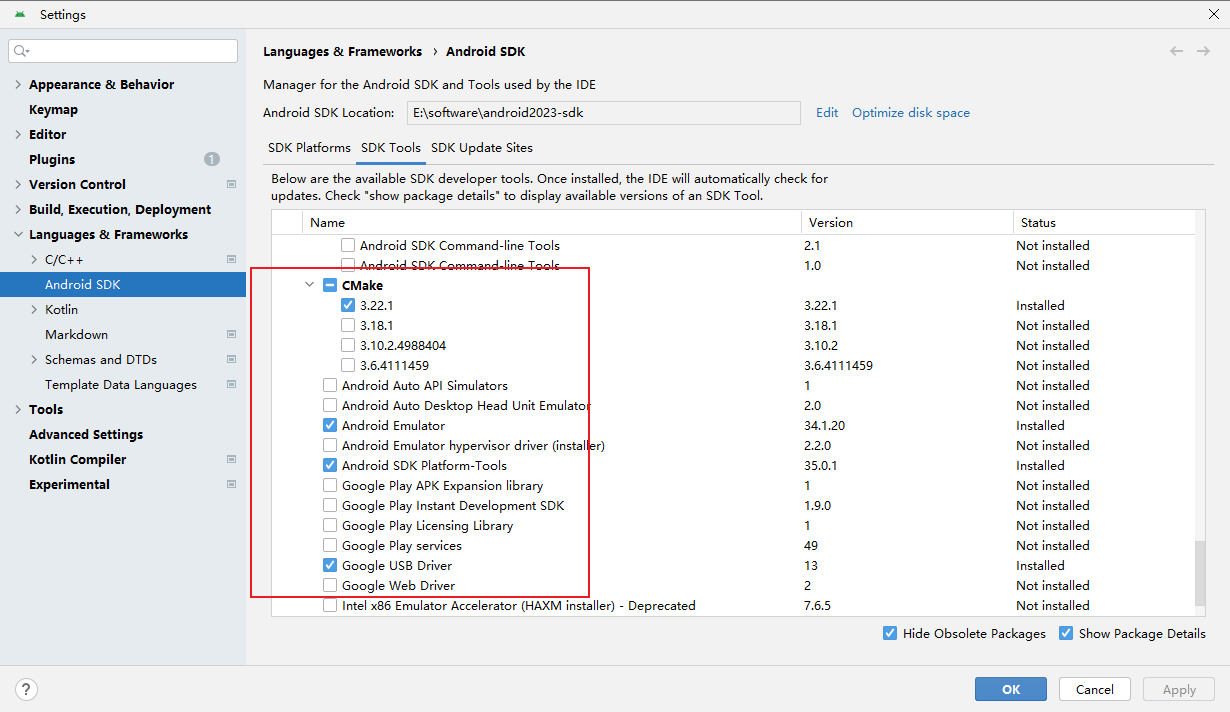
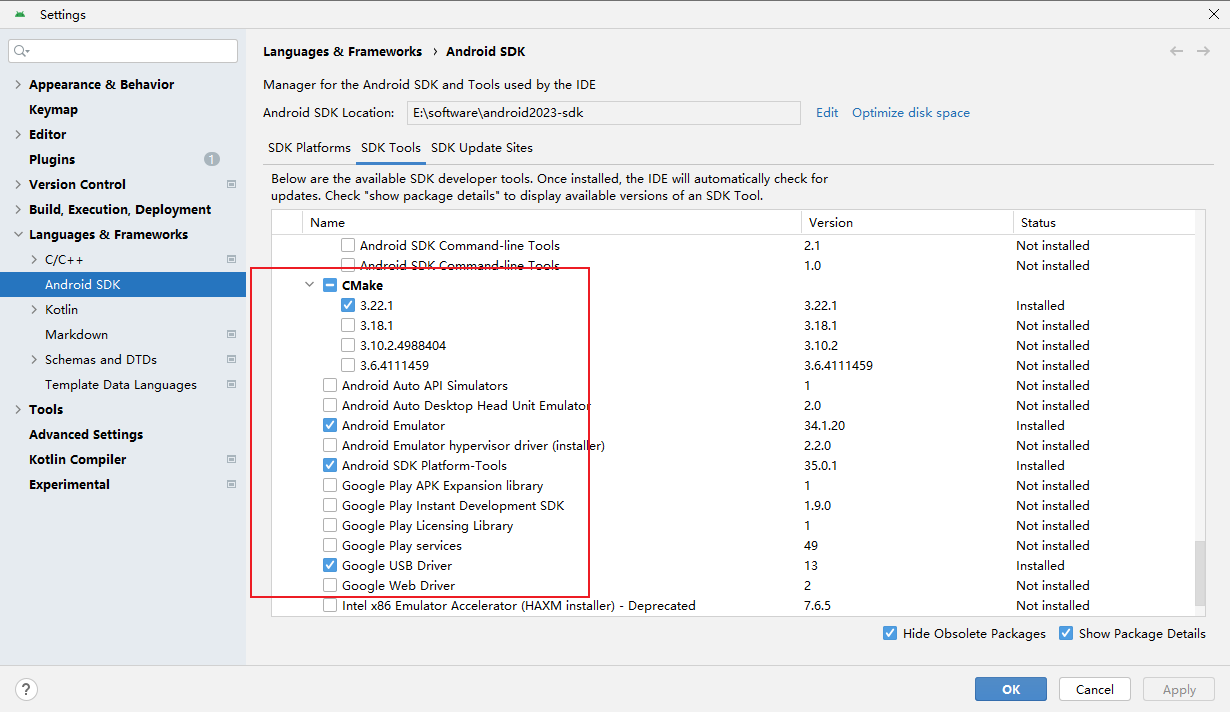
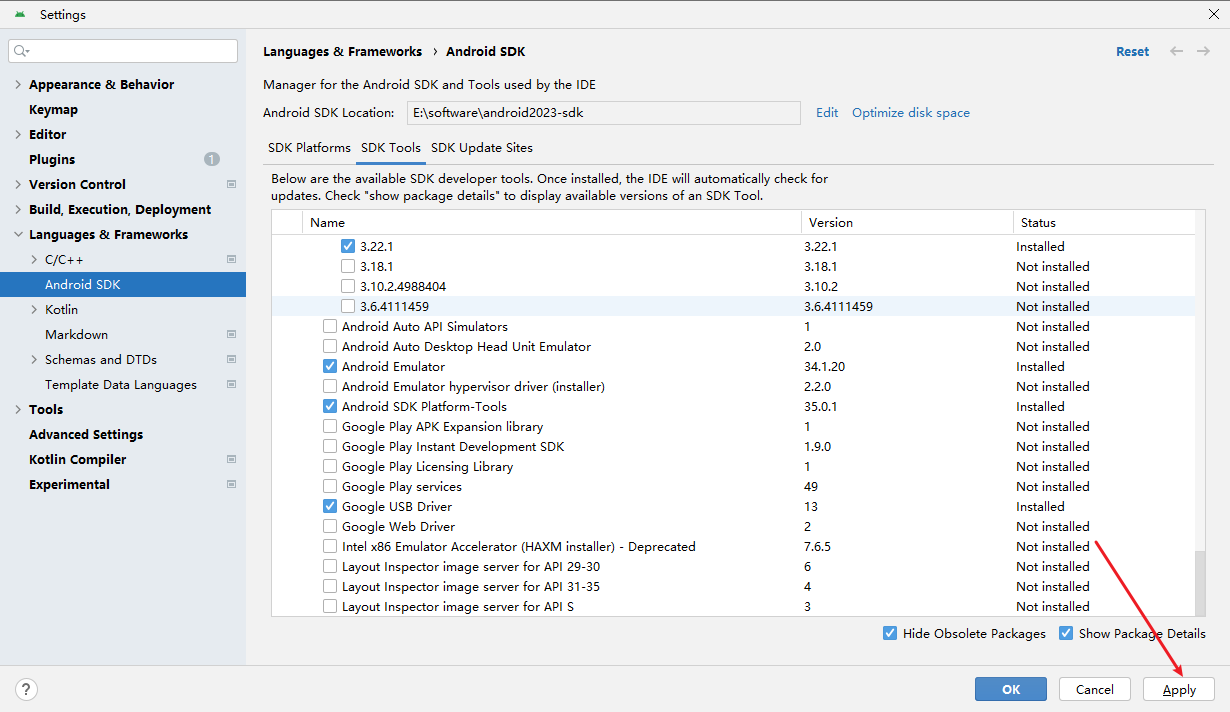
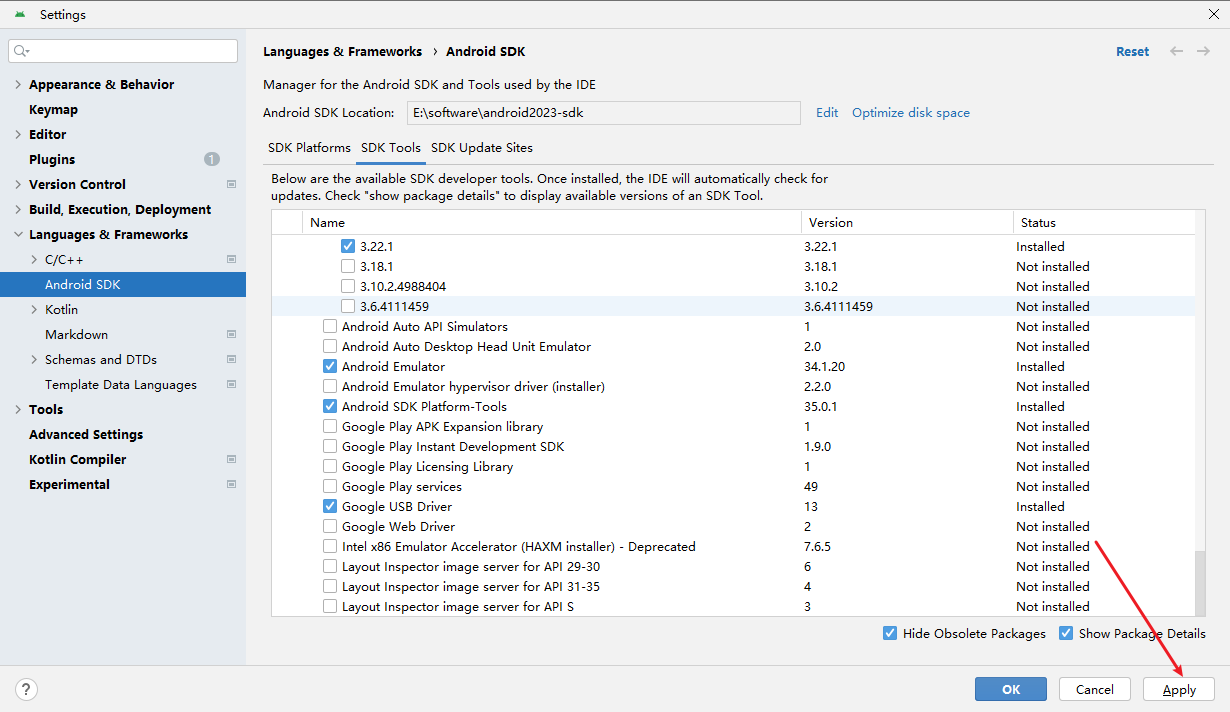
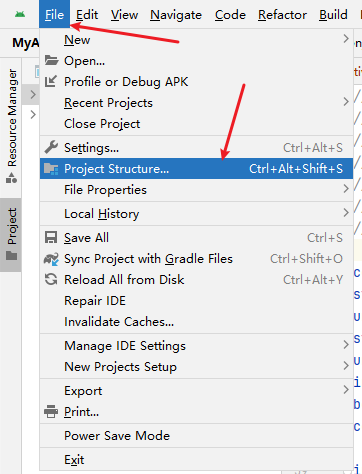
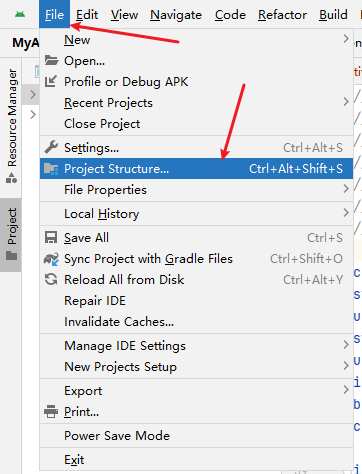
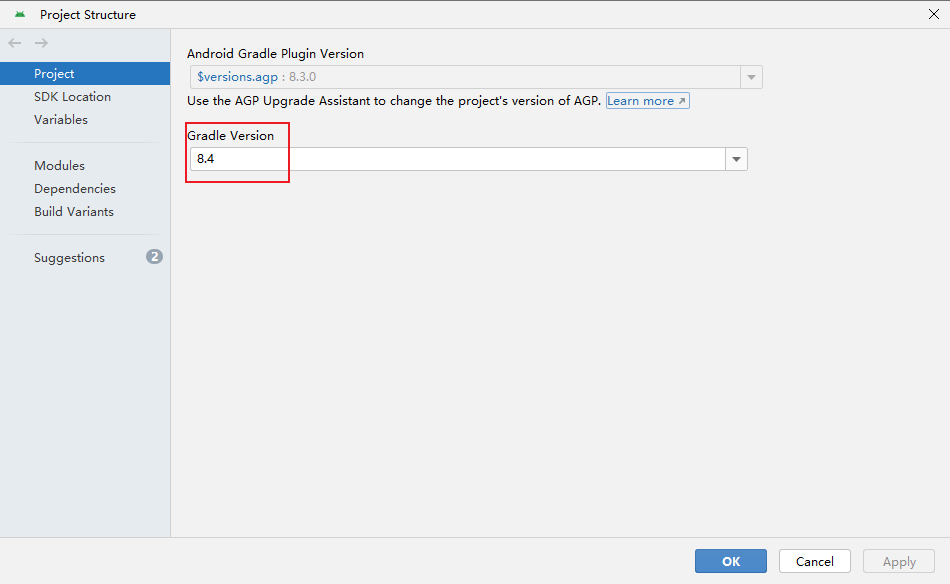
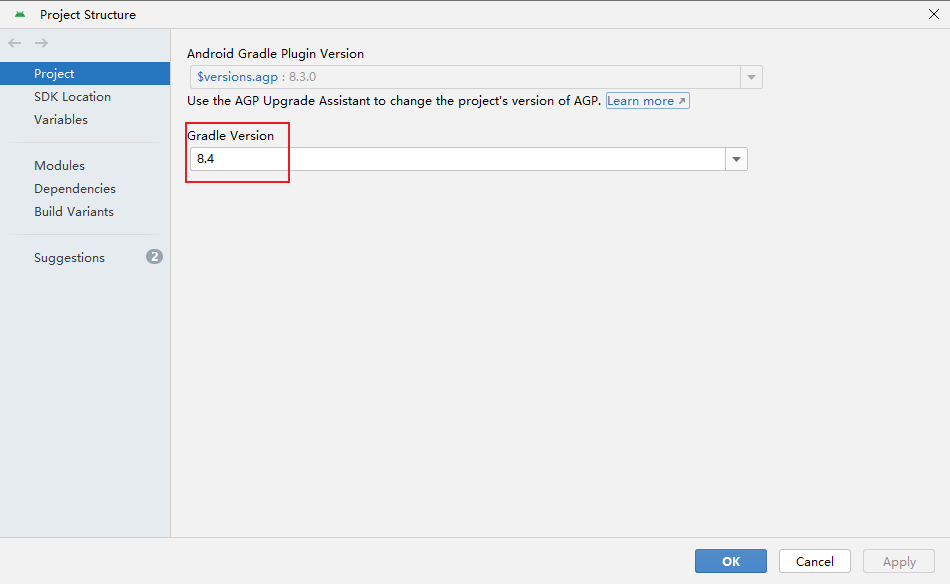
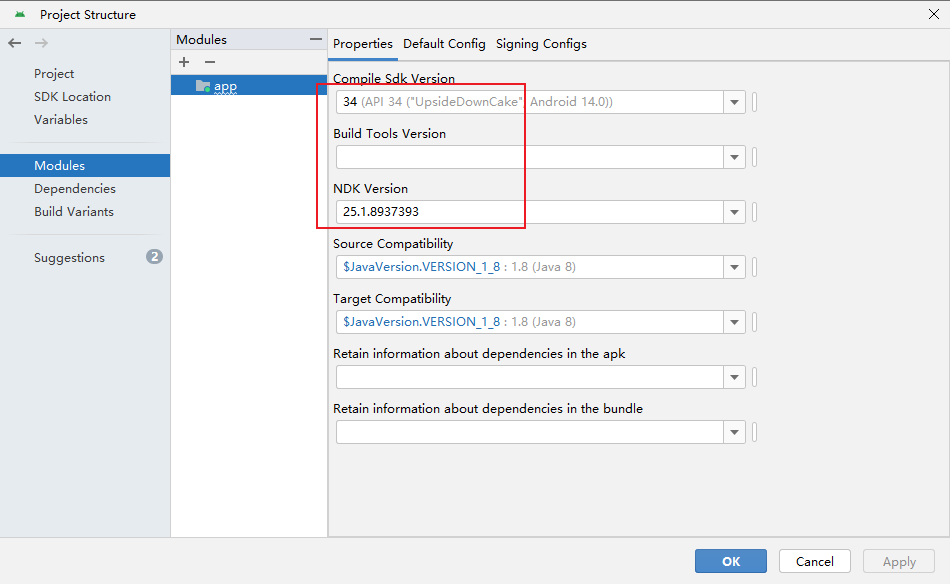
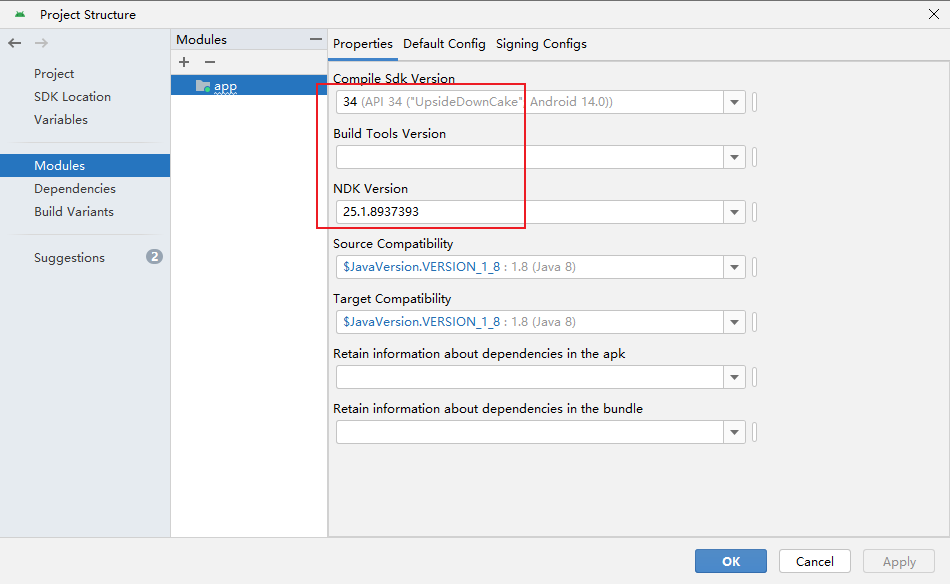
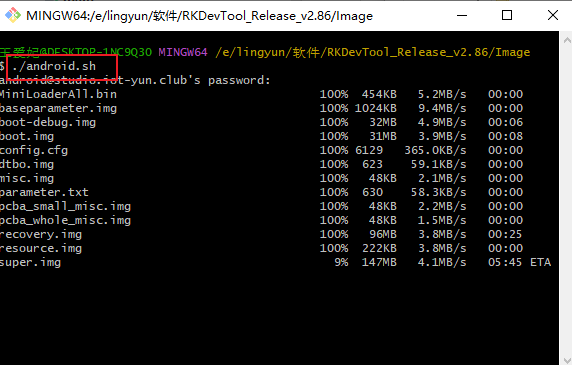
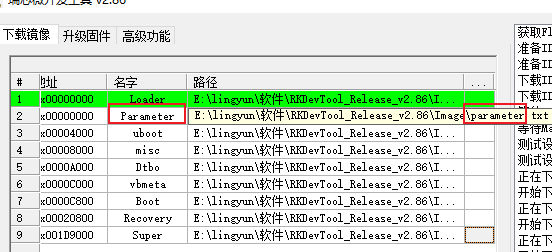
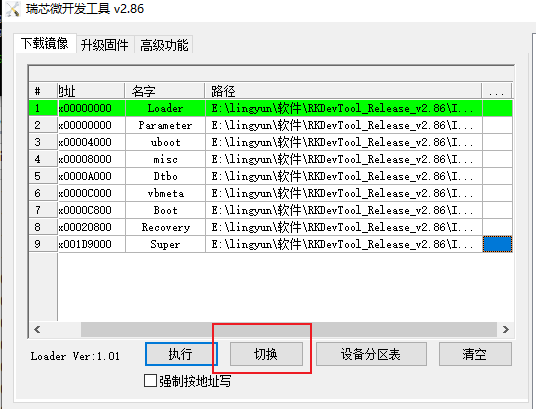
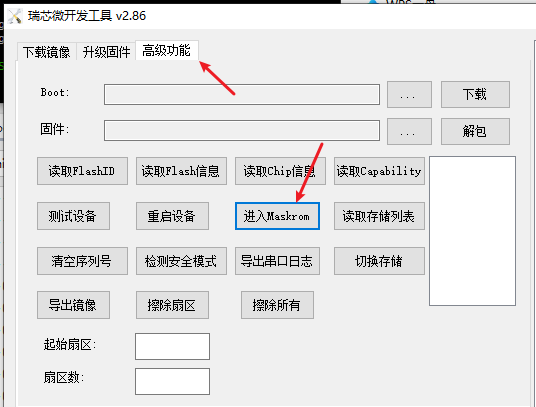
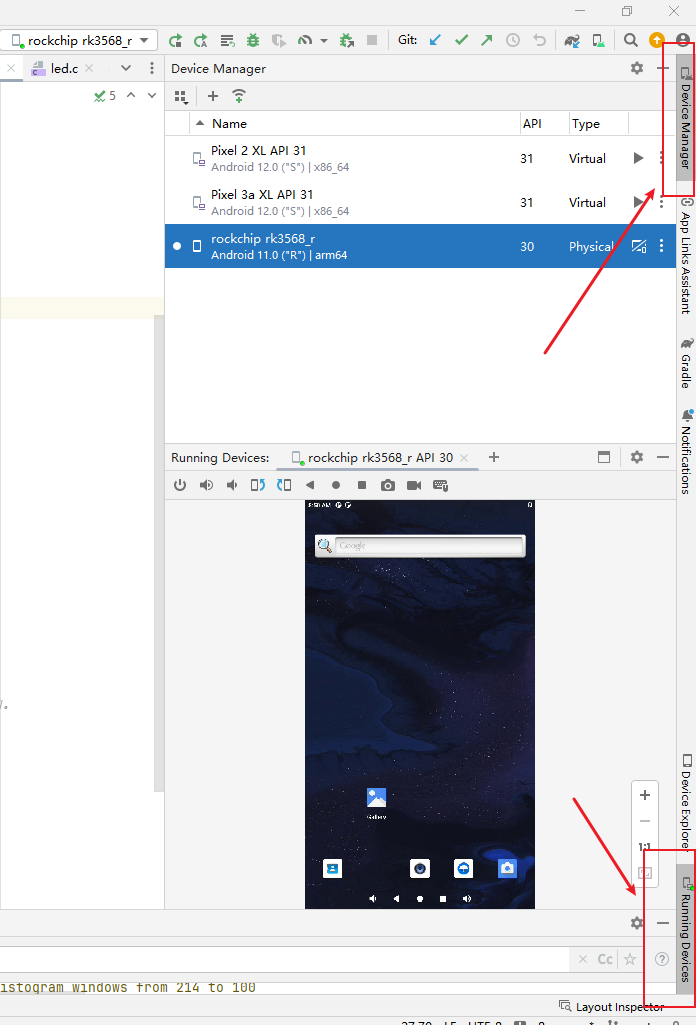
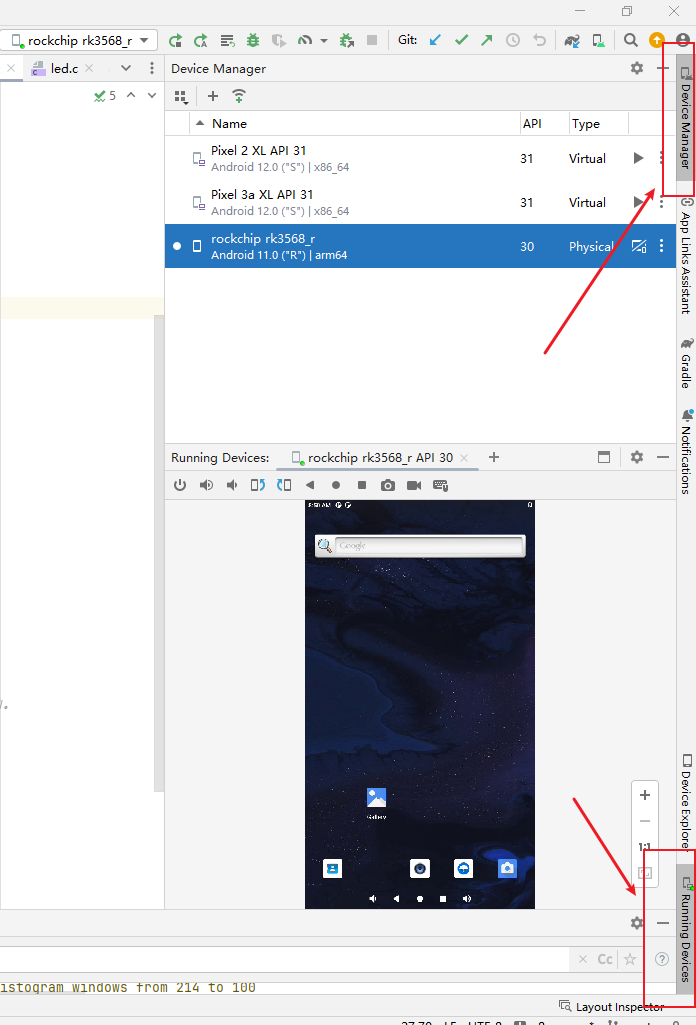
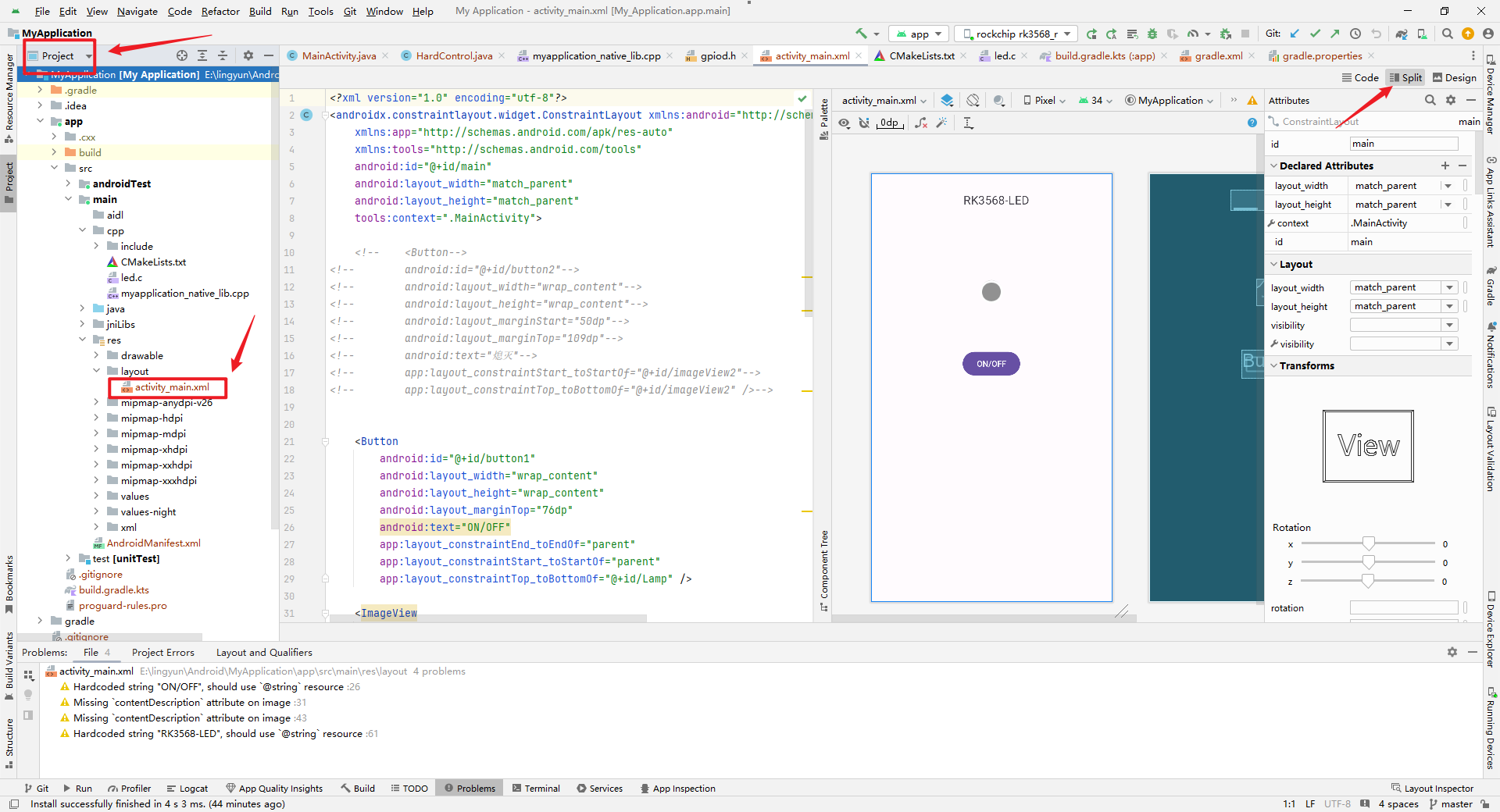
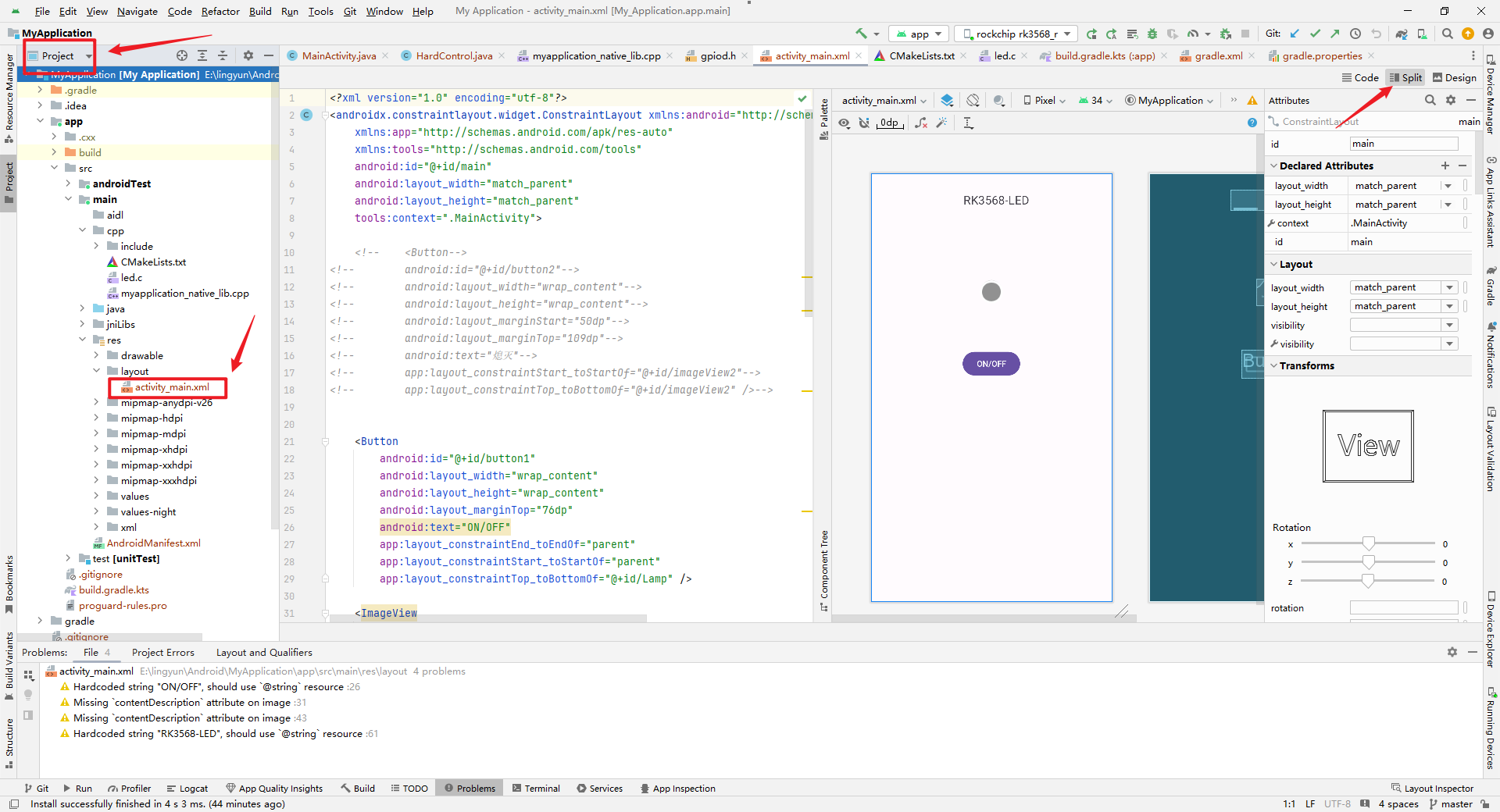
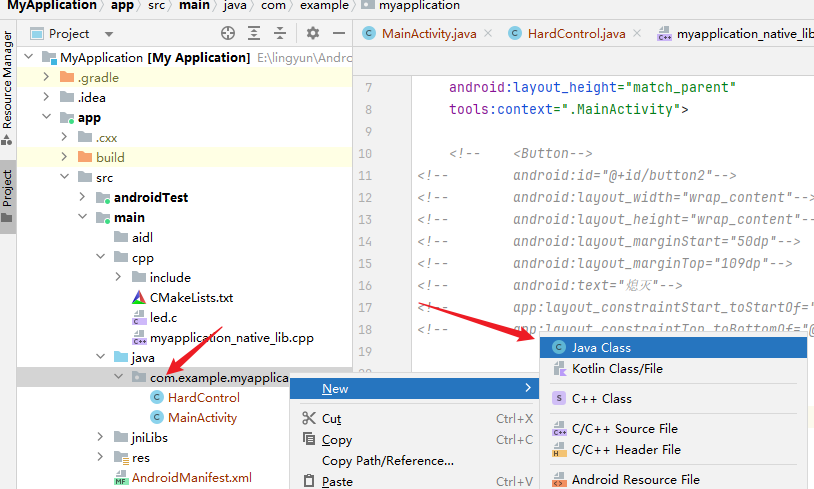
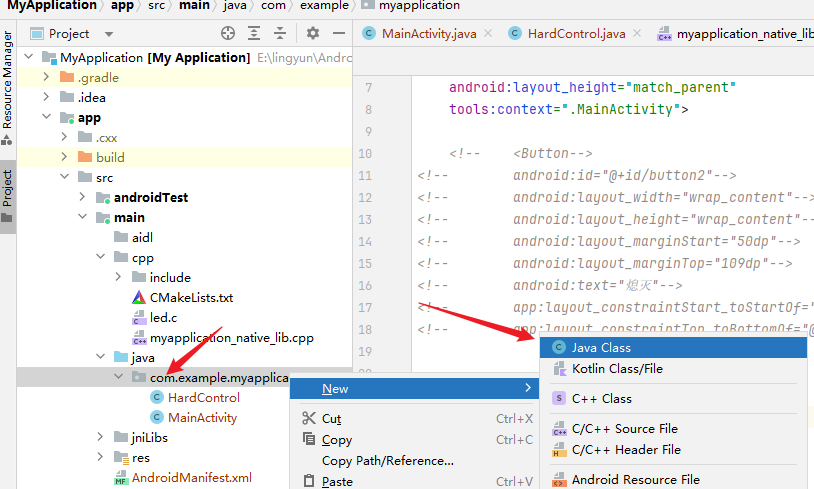
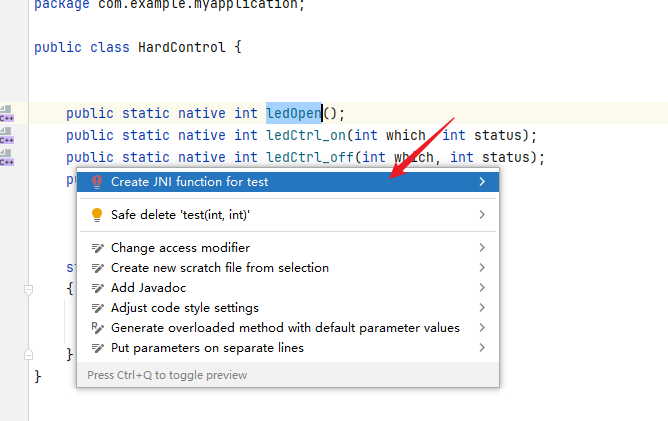
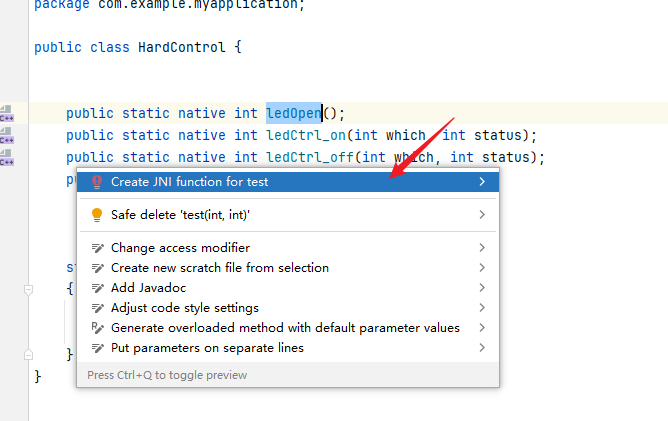
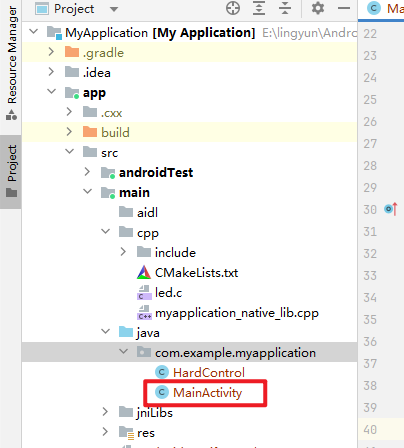
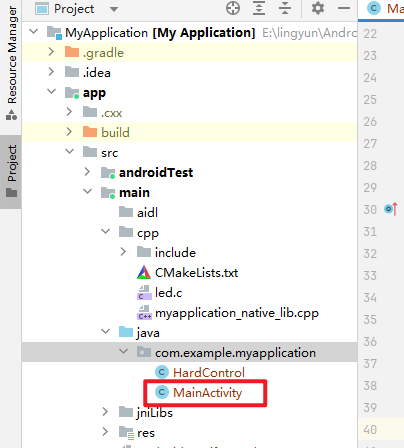
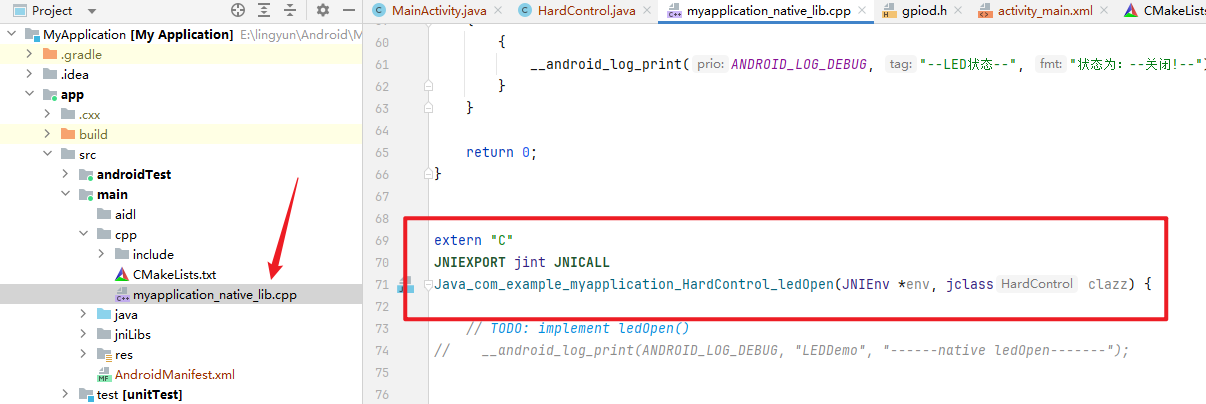
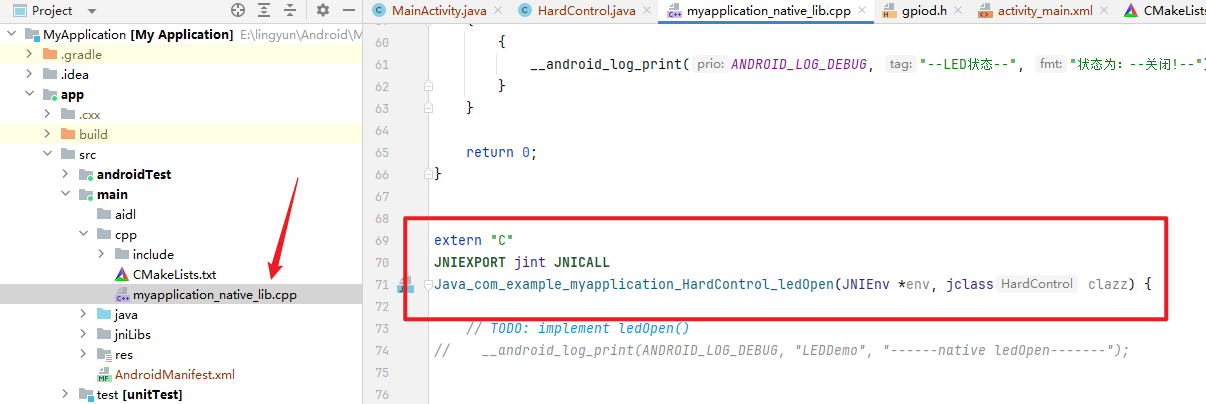
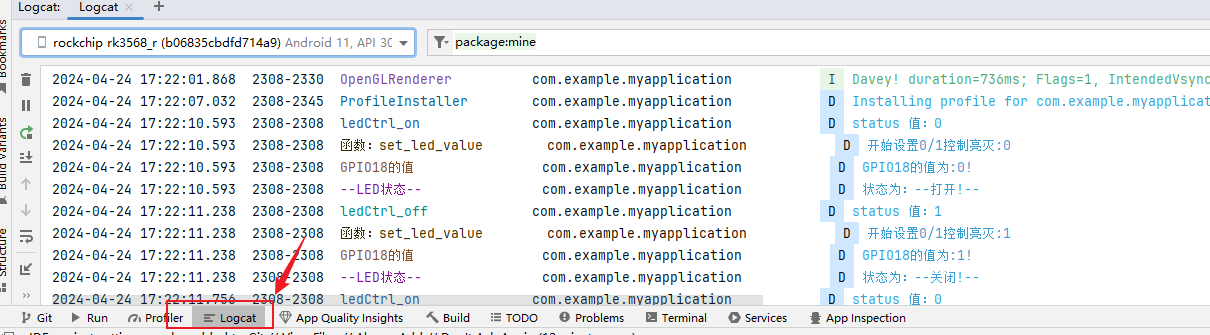
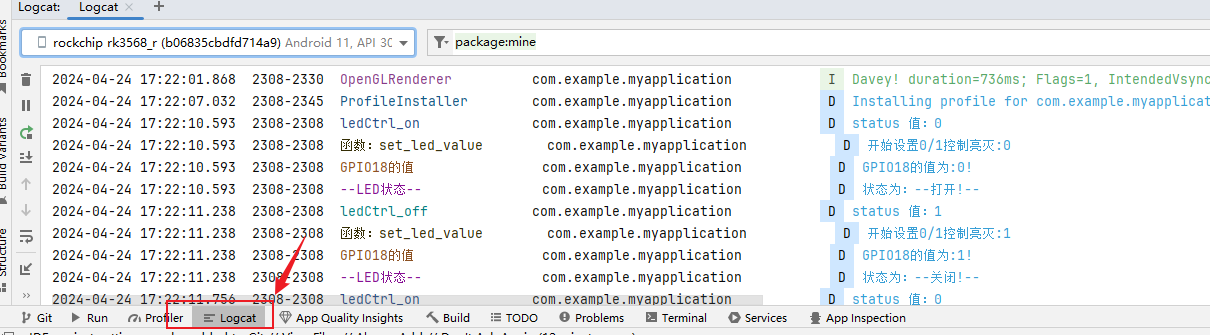
New file @@ -0,0 +1,648 @@ # Android SDK开发入门文档 首先在windows安装Android Studio,配置好环境,还要在虚拟机上使用同样的步骤安装Android Studio,虚拟机上安装的AS只有一个功能,就是要使用它的ndk交叉编译libgpiod动态库(在虚拟机上也可以不安装Android Studio,直接下载ndk来交叉编译,方法自行百度,本文档介绍第一种方法),其它工作都在windows上进行,交叉编译完成后,会生成gpio.h头文件和libgpiod.so动态库,在windows系统打开AS,配置项目的CMakeLists.txt文件,导入交叉编译好的libgpiod.so,再导入gpio.h头文件到cpp文件中,就能调用libgpiod库的接口。项目需要用到gpio18,gpio20,gpio22三个引脚,把这三个引脚空闲出来,再给gpiochip0赋予777权限,gpiochip0是管理GPIO0(一组引脚有32个,gpio0-32)这一组的gpio,要控制gpio18,gpio20,gpio22就需要有gpiochip0的操作权限。 **总结以上,开发流程为:安装AS,配置AS环境,连接开发板, 空闲gpio引脚,开gpiochip0权限,使用NDK交叉编译libgpiod,设计UI界面,配置CMakeLists.txt,写JNI,最后编译运行**。 ------ ## 1 Android Studio下的 Java App 开发 ### 1.1 软件安装 - 下载地址:https://developer.android.com/?hl=zh-cn  - 安装教程:参考博客-[Android Studio 安装配置教程 - Windows(详细版)-CSDN博客](https://blog.csdn.net/qq_38436214/article/details/105073213) ### 1.2 环境配置 - 首先新建一个项目,选择C++  -  -  - 安装下载ndk        - 查看自己的项目结构    ### 1.3 硬件连接  - **烧录软件下载** 从凌云实验室文件服务器上下载并安装下面烧录软件。 1、[CP210x_VCP_Windows.zip](http://studio.iot-yun.club:2211/rockchip/tools/CP210x_VCP_Windows.zip) 解压缩并安装开发板的Console调试串口驱动; 2、[DriverAssitant_v5.1.1.zip](http://studio.iot-yun.club:2211/rockchip/tools/DriverAssitant_v5.1.1.zip) , 解压缩安装RK3568开发板驱动; 3、[RKDevTool_Release_v2.86.zip](http://studio.iot-yun.club:2211/rockchip/tools/RKDevTool_Release_v2.86.zip) ,直接解压缩即可运行的 RK3568开发板烧录软件;  - **xshell软件,串口连接**    - 在这两个窗口管理开发板连接  ### 1.4 UI界面设计 #### 1.4.1 **切换Project视图,代码文件名为activity_main.xml**  - **activity_main.xml**代码: ```xml <?xml version="1.0" encoding="utf-8"?> <androidx.constraintlayout.widget.ConstraintLayout xmlns:android="http://schemas.android.com/apk/res/android" xmlns:app="http://schemas.android.com/apk/res-auto" xmlns:tools="http://schemas.android.com/tools" android:id="@+id/main" android:layout_width="match_parent" android:layout_height="match_parent" tools:context=".MainActivity"> <Button android:id="@+id/button1" android:layout_width="wrap_content" android:layout_height="wrap_content" android:layout_marginTop="76dp" android:text="ON/OFF" app:layout_constraintEnd_toEndOf="parent" app:layout_constraintStart_toStartOf="parent" app:layout_constraintTop_toBottomOf="@+id/Lamp" /> <ImageView android:id="@+id/imageView2" android:layout_width="45dp" android:layout_height="45dp" android:layout_marginTop="180dp" android:visibility="visible" app:layout_constraintEnd_toEndOf="parent" app:layout_constraintHorizontal_bias="0.5" app:layout_constraintStart_toStartOf="parent" app:layout_constraintTop_toTopOf="parent" app:srcCompat="@android:drawable/presence_invisible" /> <ImageView android:id="@+id/Lamp" android:layout_width="45dp" android:layout_height="45dp" android:layout_marginTop="180dp" android:visibility="invisible" app:layout_constraintEnd_toEndOf="parent" app:layout_constraintHorizontal_bias="0.5" app:layout_constraintStart_toStartOf="parent" app:layout_constraintTop_toTopOf="parent" app:srcCompat="@android:drawable/presence_online" /> <TextView android:id="@+id/textView" android:layout_width="150dp" android:layout_height="35dp" android:gravity="center" android:text="RK3568-LED" android:textSize="20sp" app:layout_constraintBottom_toBottomOf="parent" app:layout_constraintEnd_toEndOf="parent" app:layout_constraintHorizontal_bias="0.532" app:layout_constraintStart_toStartOf="parent" app:layout_constraintTop_toTopOf="parent" app:layout_constraintVertical_bias="0.04" /> </androidx.constraintlayout.widget.ConstraintLayout> ``` #### 1.4.2 **在java文件夹下新建一个HardControl类** - 用于放函数接口   - HardControl.java: ```java package com.example.myapplication; public class HardControl { public static native int ledOpen();//打开设备 public static native int ledCtrl_on(int which, int status);//打开led灯 public static native int ledCtrl_off(int which, int status);//关闭led灯 static { System.loadLibrary("myapplication"); System.loadLibrary("gpiod"); } } ``` #### 1.4.3 编写MainActivity.java - MainActivity.java相当于c语言的main函数  - **MainActivity.java** ```java package com.example.myapplication; import android.os.Bundle; import android.view.View; import android.widget.Button; import android.widget.ImageView; import androidx.appcompat.app.AppCompatActivity; public class MainActivity extends AppCompatActivity implements View.OnClickListener{ ImageView L1; Button bnt1; boolean isLightOn = false; // 指示灯状态 HardControl hardControl = new HardControl(); @Override protected void onCreate(Bundle savedInstanceState) { super.onCreate(savedInstanceState); setContentView(R.layout.activity_main); bnt1 = findViewById(R.id.button1);// 按钮灯开 hardControl.ledOpen(); bnt1.setOnClickListener(this); L1 = (ImageView)this.findViewById(R.id.Lamp); } @Override public void onClick(View view) { int i=view.getId(); if (i==bnt1.getId()) { if(isLightOn) { L1.setVisibility(View.INVISIBLE); hardControl.ledCtrl_off(1,1); isLightOn = false; } else { L1.setVisibility(View.VISIBLE); hardControl.ledCtrl_on(1,0); isLightOn = true; } } } protected void onDestroy() { super.onDestroy(); // 当Activity销毁时,关闭LED控制 hardControl.ledCtrl_close(); } } ``` ------ ## 2 Android Framwork/JNI层的开发 ### 2.1 交叉编译libgpiod ```bash #下载安装相关编译工具 sudo apt update sudo apt-get install autoconf-archive sudo apt-get install autoconf automake libtool ``` #### 2.1.1**下载源码然后解压** - 源码地址:https://github.com/brgl/libgpiod/tree/v1.6.x ```bash git clone https://github.com/brgl/libgpiod/tree/v1.6.x unzip libgpiod-1.6.x.zip ```  #### 2.1.2 运行脚本 ```bash cd libgpiod-1.6.x bash autogen.sh #运行脚本,会生成configure这个文件 ```  #### 2.1.3 设置交叉编译环境变量 - 首先安装AS,我的安装目录为/home/af/Android/ **(重点,环境变量没设置对交叉编译会失败)** ```bash export NDK=/home/af/Android/Sdk/ndk/26.2.11394342 # 根据自己的NDK路径设置 #export TOOLCHAIN=${NDK}/toolchains/llvm/prebuilt/darwin-x86_64 export TOOLCHAIN=${NDK}/toolchains/llvm/prebuilt/linux-x86_64 #export TARGET=armv7a-linux-androideabi #export TARGET=i686-linux-android #export TARGET=x86_64-linux-android export TARGET=aarch64-linux-android #TARGET=aarch64-linux-android 是我们选择的交叉编译的目标架构,根据需要选择不通的架构 export API=29 export AR=${TOOLCHAIN}/bin/llvm-ar #打包器,用于库操作,可以通过该工具从一个库中删除或者增加目标代码模块。 export CC=${TOOLCHAIN}/bin/${TARGET}${API}-clang # 编译器,对C源文件进行编译处理,生成汇编文件。 export AS=${CC} #汇编器,将汇编文件生成目标文件(汇编文件使用的是指令助记符, AS将它翻译成机器码) export CXX=${TOOLCHAIN}/bin/${TARGET}${API}-clang++ export LD=${TOOLCHAIN}/bin/ld #链接器,为前面生成的目标代码分配地址空间,将多个目标文件链接成一个库或者是可执行文件。 export RANLIB=${TOOLCHAIN}/bin/llvm-ranlib export STRIP=${TOOLCHAIN}/bin/llvm-strip # 以最终生成的可执行文件或者库文件作为输入,然后消除掉其中的源码。 ```  ```markdown "aarch64-linux-android29-clang" 是一个基于 Clang 编译器的工具链,用于在 Android 平台上编译 ARMv8 架构的代码。它的主要特点包括: 1、支持使用 LLVM/Clang 编译器进行编译,具有优秀的代码优化能力和兼容性; 2、支持 ARMv8 架构指令集,可以生成针对 ARMv8 架构的优化代码; 3、针对 Android 平台进行了优化,可以使用 Android 平台上的系统库和头文件; 4、适用于 Android 9.0 及以上版本(API level 29)。 5、使用该工具链可以在 Android 平台上编译出高效、稳定、兼容性好的 ARMv8 架构代码,适用于开发 Android 平台上的应用程序和系统级组件。 ```  #### 2.1.4 在源码目录下运行上一步生成的configure脚本,生成Makefile文件 ```bash sudo ./configure CC=${CC} CXX=${CXX} RANLIB=${RANLIB} AR=${AR} STRIP=${STRIP} --prefix=/home/af/android_libgpiod --host=${TARGET} # --prefix指定安装目录 ```  #### 2.1.5 使用make命令,运行Makefile文件,再安装 ```bash sudo make sudo make install ``` - 我的库文件和头文件安装到了这里,就是之前--prefix指定的目录  - 我们只要生成的头文件和动态库,拷贝这两个文件  - 用file命令查看文件类型,看到这个输出表示交叉编译成功,否则重新编译  ------ ### 2.2 java加载交叉编译的libgpiod.so #### 2.2.1 新建C++项目  #### 2.2.2 新建目录,将头文件和动态库复制进去,目录结构如图所示 - 安卓设备架构为arm64-v8a,就新建为arm64-v8a  #### 2.2.3 修改CMakeLists.txt文件,导入、链接库 ```markdown ########导入libgpiod########### #在CMakeLists.txt文件中添加一个导入库(imported library)的声明, #IMPORTED: 这是一个可选的参数,表示库是一个导入库(imported library),即该库不是由CMake构建生成的,而是由外部提供的。 add_library(libgpiod SHARED IMPORTED) set_target_properties( libgpiod PROPERTIES IMPORTED_LOCATION ${CMAKE_SOURCE_DIR}/../jniLibs/${CMAKE_ANDROID_ARCH_ABI}/libgpiod.so) target_link_libraries(${CMAKE_PROJECT_NAME} # List libraries link to the target library ${log-lib} libgpiod ) ``` #### 2.2.4 修改build.gradle.kts文件,添加如下内容  #### 2.2.5 导入加载libgpiod库  ------ ### 2.3 JNI编写 **ledOpen ledCtrl_on ledCtrl_off是JNI接口**,鼠标选中函数名,按alt+enter键,点击Create JNI...,然后会在cpp文件里自动生成JNI函数接口名,在里面写代码   - myapplication.cpp (记得导入头文件include/gpiod.h) ```cpp #include <jni.h> #include <string> #include <android/log.h> #include <sys/types.h> #include <sys/stat.h> #include <fcntl.h> #include <sys/ioctl.h> #include <unistd.h> #include <sys/select.h> #include "include/gpiod.h" // Write C++ code here. // // Do not forget to dynamically load the C++ library into your application. // // For instance, // // In MainActivity.java: // static { // System.loadLibrary("myapplication"); // } // // Or, in MainActivity.kt: // companion object { // init { // System.loadLibrary("myapplication") // } // } const char *chipname = "gpiochip0"; //GPIO1 struct gpiod_chip *chip; unsigned int line_num ; struct gpiod_line *line18 ; unsigned int line_num_18 = 18; // 偏移GPIO 20 GPIO1_20 int ret; bool isused; const char *chip_name; int set_led_value(int status) { __android_log_print(ANDROID_LOG_DEBUG, "函数:set_led_value", "开始设置0/1控制亮灭:%d",status); //设置GPIO18的值 ret = gpiod_line_set_value(line18, status);//设置输出状态 if (ret < 0) { __android_log_print(ANDROID_LOG_DEBUG, "Set On/Off", "Set line output failed. val:%d!",status); return 0; } ret = gpiod_line_get_value(line18); __android_log_print(ANDROID_LOG_DEBUG, "GPIO18的值", "GPIO18的值为:%d!",ret); if (ret == 0) { __android_log_print(ANDROID_LOG_DEBUG, "--LED状态--", "状态为:--打开!--"); } else { { __android_log_print(ANDROID_LOG_DEBUG, "--LED状态--", "状态为:--关闭!--"); } } return 0; } extern "C" JNIEXPORT jint JNICALL Java_com_example_myapplication_HardControl_ledOpen(JNIEnv *env, jclass clazz) { // TODO: implement ledOpen() // __android_log_print(ANDROID_LOG_DEBUG, "LEDDemo", "------native ledOpen-------"); //1、OPEN:打开chipgpio0 chip = gpiod_chip_open_by_name(chipname); if (!chip) { __android_log_print(ANDROID_LOG_INFO, "Open chipgpio0", "Open chip by name failed. name: %s\n", chipname); return 0; } __android_log_print(ANDROID_LOG_DEBUG, "Open chipgpio0", "Successfully opened chip:%s",chipname); //2、获取打开的设备名 chip_name = gpiod_chip_name(chip); __android_log_print(ANDROID_LOG_DEBUG, "gpiod_chip_name", "The GPIO chip name as represented in the kernel: %s",chip_name); //3、获取打开的chipgpio0的引脚个数 line_num = gpiod_chip_num_lines(chip); __android_log_print(ANDROID_LOG_DEBUG, "gpiod_chip_num_lines", "Line number:%u",line_num); //4、获取GPIO18引脚句柄 line18 = gpiod_chip_get_line(chip,line_num_18); if ( !line18 ) { __android_log_print(ANDROID_LOG_DEBUG, "gpiod_chip_get_line", "Get line failed. line_num: %u",line_num_18); return 0; } //5、判断GPIO18是否被占用 isused = gpiod_line_is_used(line18); if (isused) { // GPIO线正在被使用 __android_log_print(ANDROID_LOG_DEBUG, "GPIO18 isused", "GPIO18线正在被使用"); return 0; } else { // GPIO线没有被使用 __android_log_print(ANDROID_LOG_DEBUG, "GPIO18 is not used", "GPIO18线没有被使用"); } //6、设置GPIO18为输出模式 ret = gpiod_line_request_output(line18,NULL ,1); if (ret < 0) { __android_log_print(ANDROID_LOG_DEBUG, "设置为输出模式", "输出模式设置失败"); return 0; } __android_log_print(ANDROID_LOG_DEBUG, "设置为输出模式", "输出模式设置成功!"); return 2; } extern "C" JNIEXPORT jint JNICALL Java_com_example_myapplication_HardControl_ledCtrl_1on(JNIEnv *env, jclass clazz, jint which, jint status) { // TODO: implement ledCtrl_on() __android_log_print(ANDROID_LOG_DEBUG, "ledCtrl_on", "status 值:%d",status); set_led_value(status); return 0; } extern "C" JNIEXPORT jint JNICALL Java_com_example_myapplication_HardControl_ledCtrl_1off(JNIEnv *env, jclass clazz, jint which, jint status) { // TODO: implement ledCtrl_off() __android_log_print(ANDROID_LOG_DEBUG, "ledCtrl_off", "status 值:%d",status); set_led_value(status); return 0; } extern "C" JNIEXPORT jint JNICALL Java_com_example_myapplication_HardControl_ledCtrl_1close(JNIEnv *env, jclass clazz) { // TODO: implement ledCtrl_close() set_led_value(1); gpiod_line_release(line18); gpiod_chip_close(chip); } ``` #### 2.3.1 gpiochip0开权限 - app默认是以普通用户运行,但/dev/gpiochip0的权限默认为为600,需要修改为666才能控制,修改之后重新烧录镜像  #### 2.3.2 编译运行程序  - 可以通过Logcat查看运行日志  - app界面,点击控制led灯亮灭  - 运行结果 <img src="./images/image-20240426164804753.png" alt="image-20240426164804753" style="zoom:33%;" /><img src="./images/image-20240426165118487.png" alt="image-20240426165118487" style="zoom:33%;" /> <img src="./images/image-20240426165136395.png" alt="image-20240426165136395" style="zoom: 67%;" /> ------ ## 附:烧录镜像 - **image**目录下,运行android脚本   - 打开软件,空白处右键,导入配置  - 双击这些空白格,把镜像路径设置一下,Loader就是选取.bin结尾的文件,其它的对应文件名  - 点击切换  - 点击高级功能,进入Maskrom  - 点击执行  - 下载完成后会自动重启,再点复位按键重启  
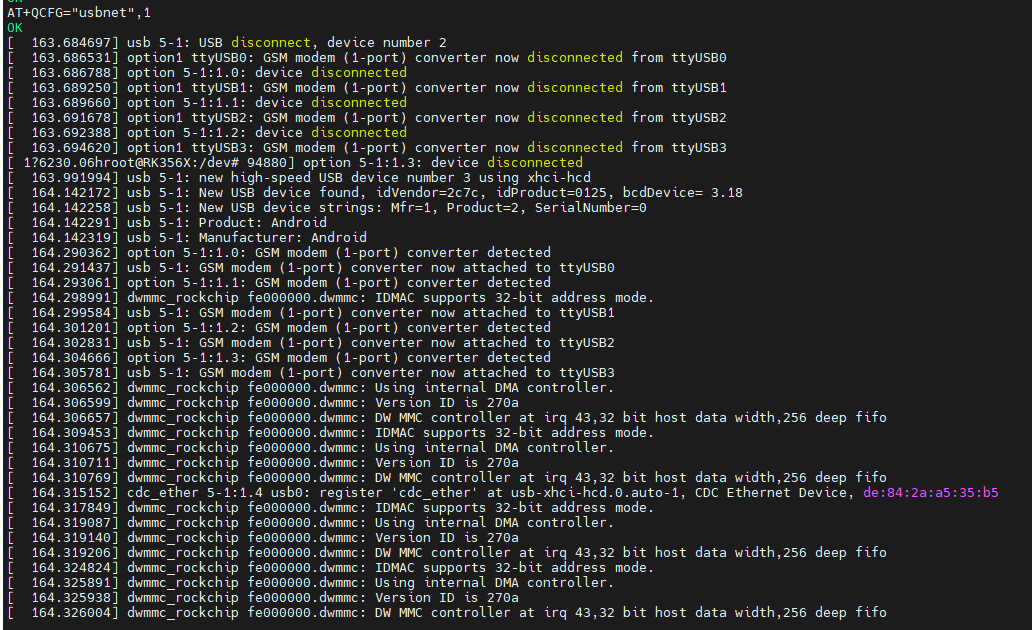
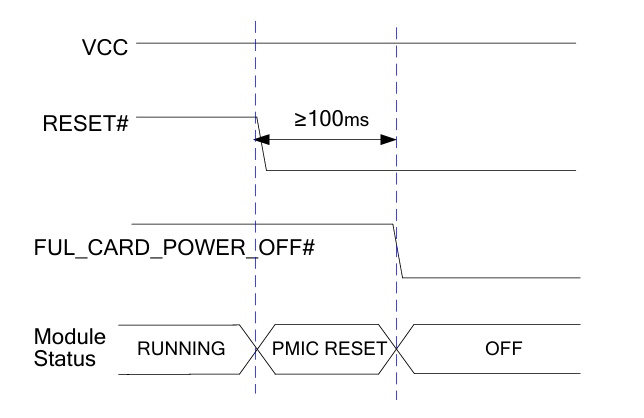
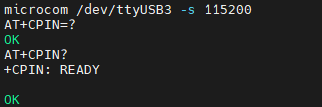
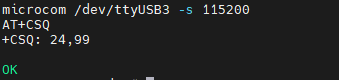
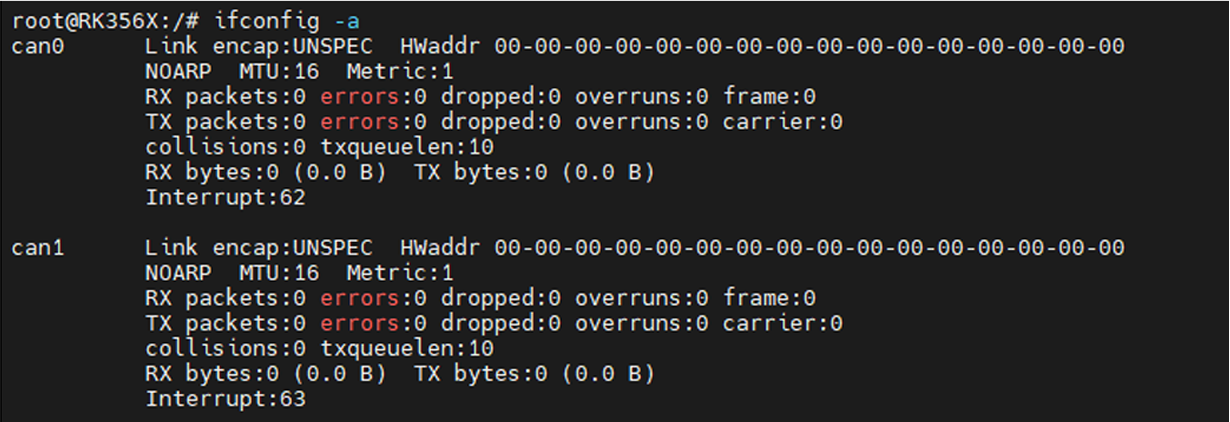
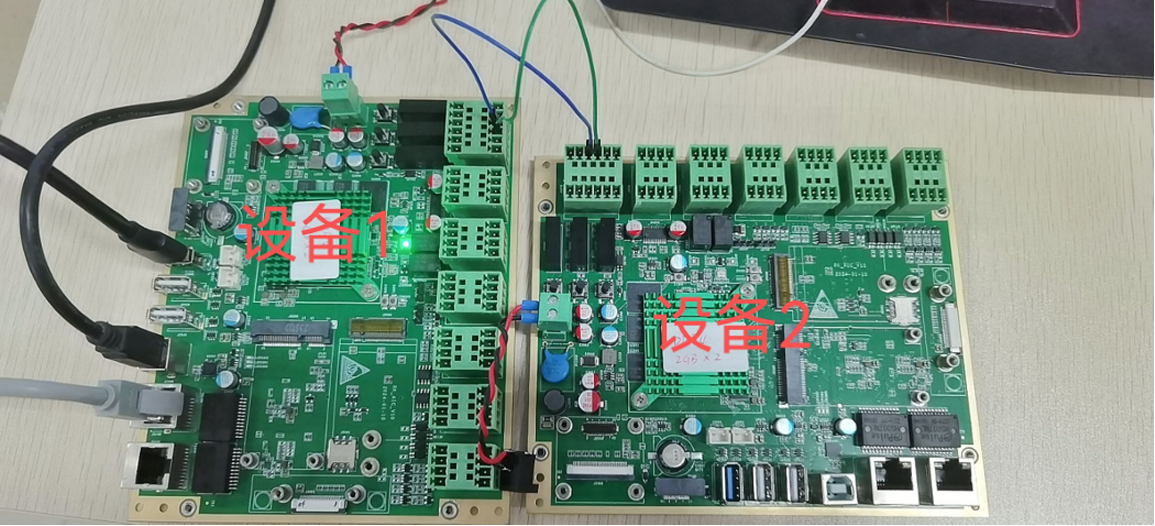
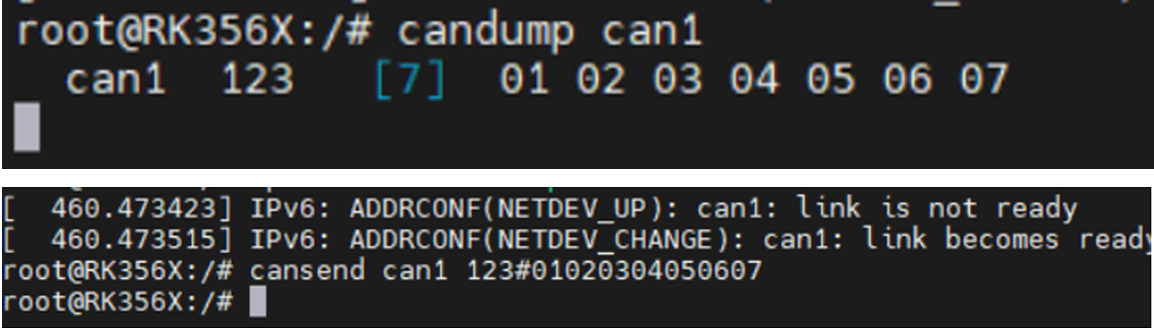
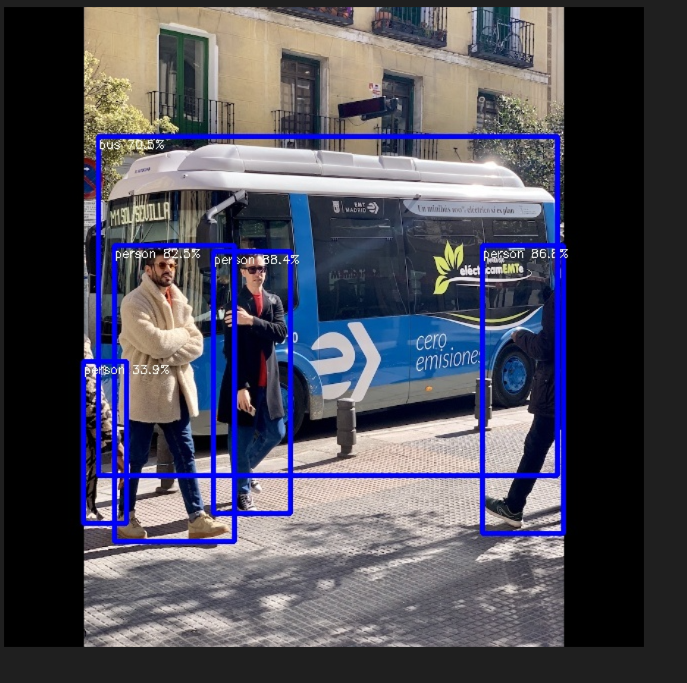
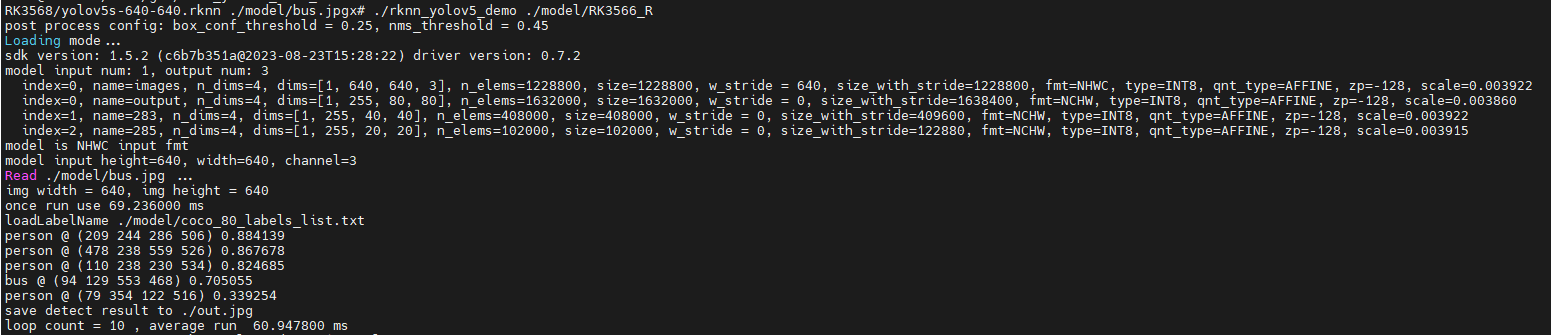
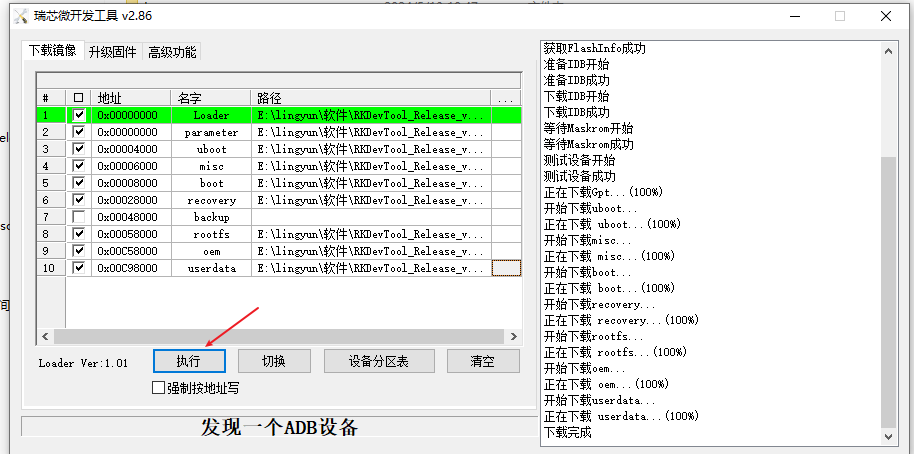
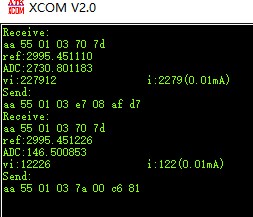
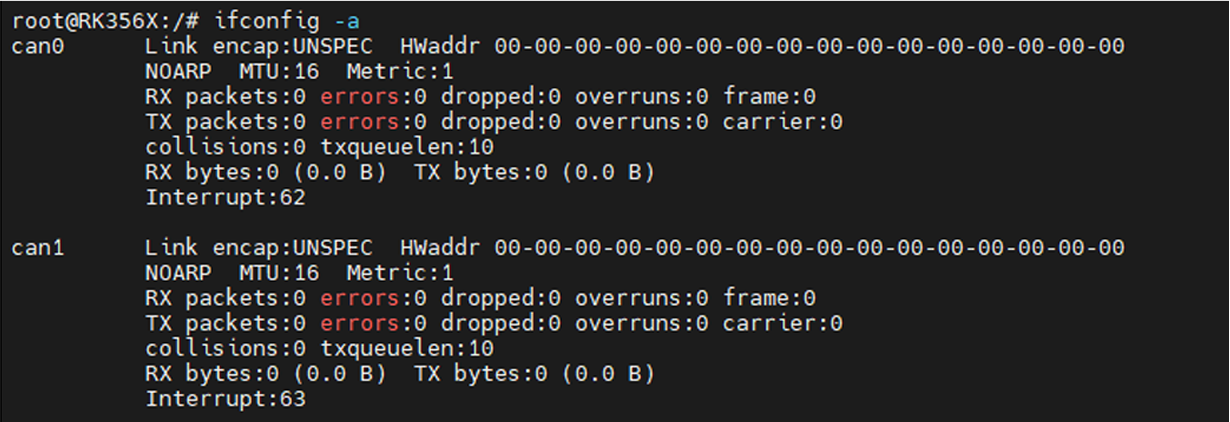
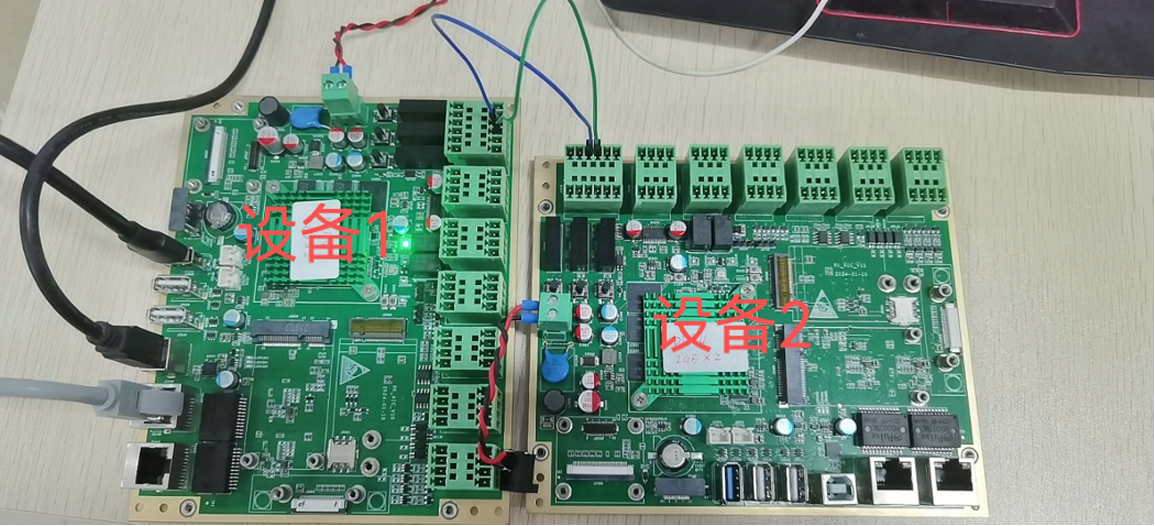
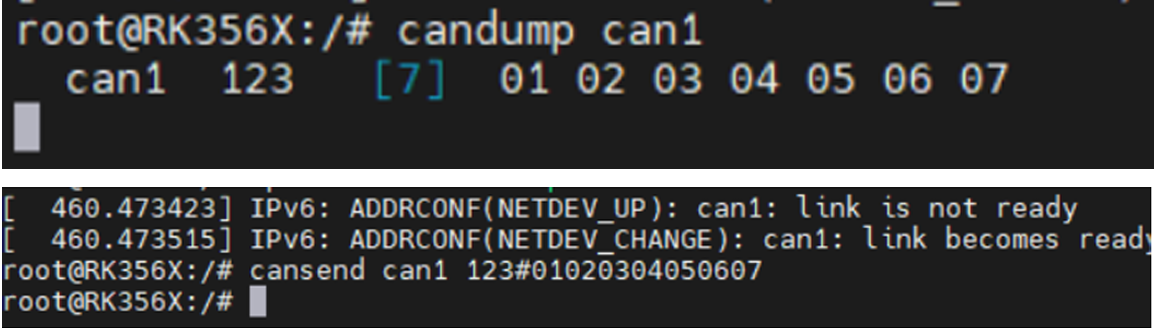
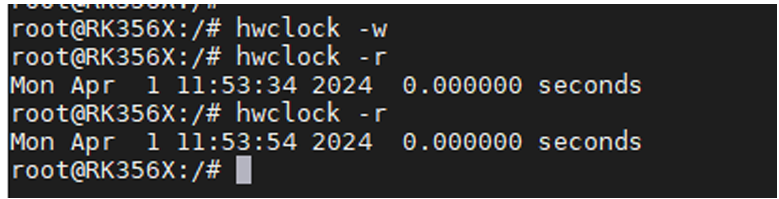
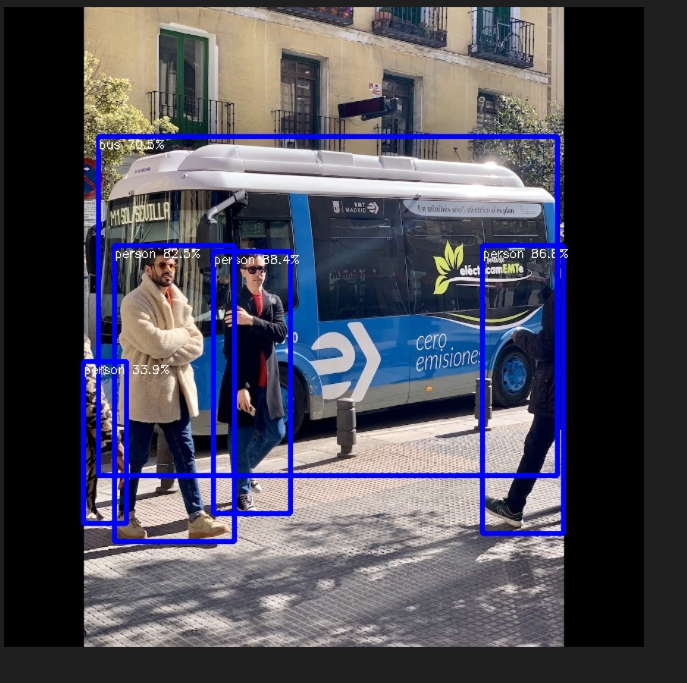
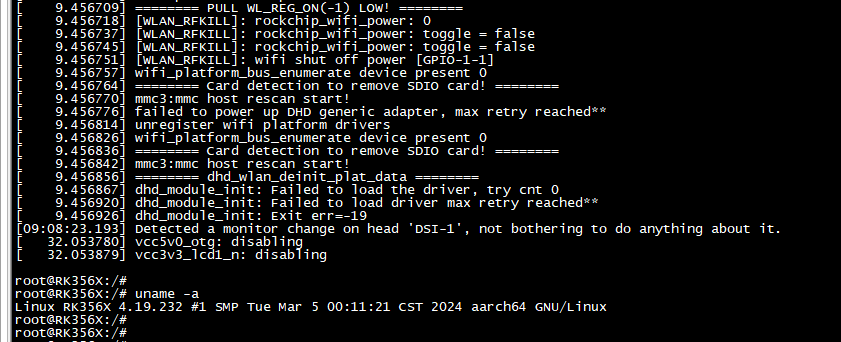
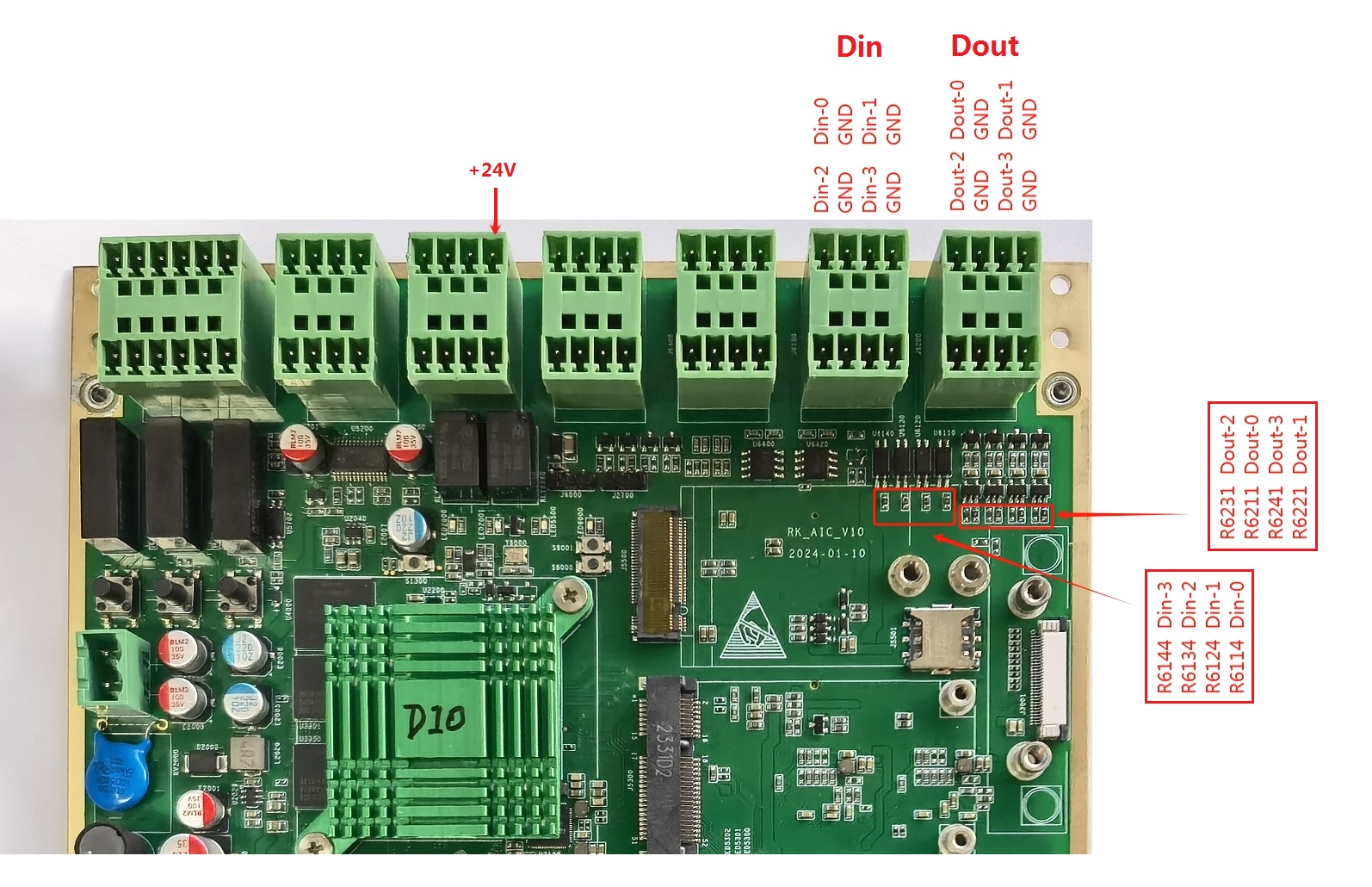
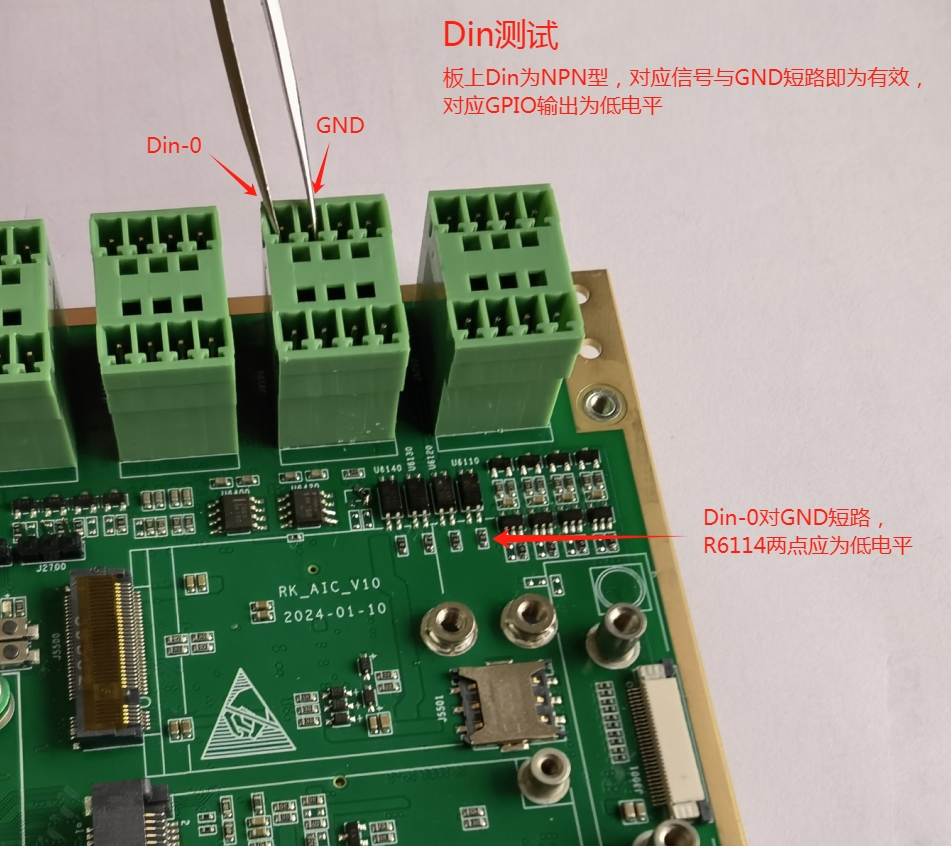
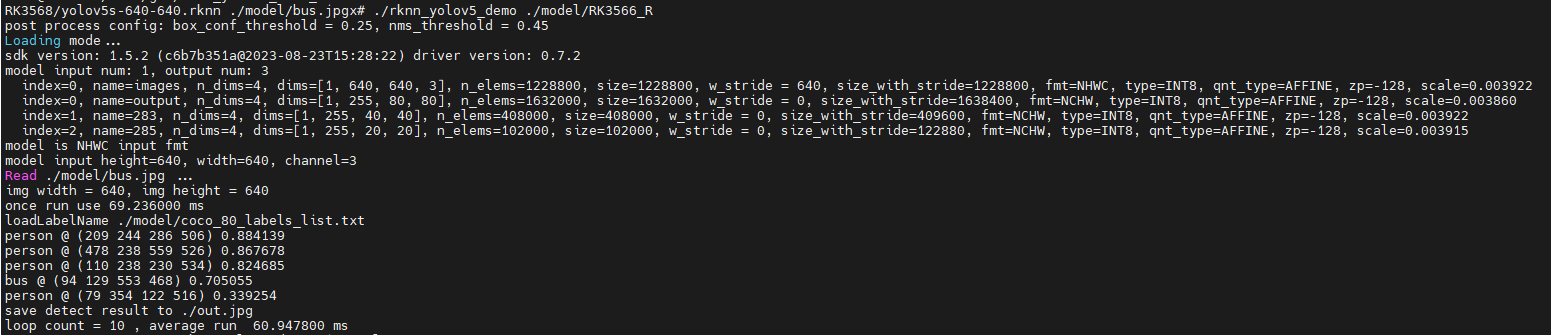
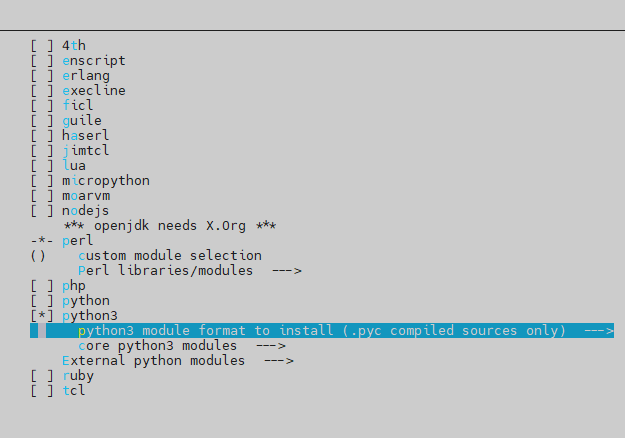
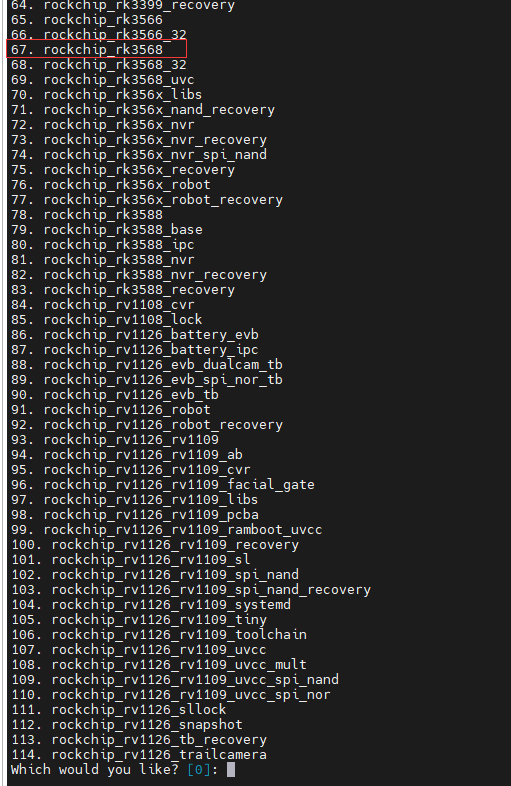
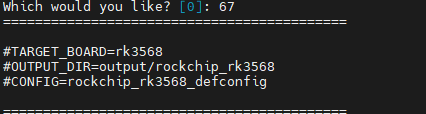
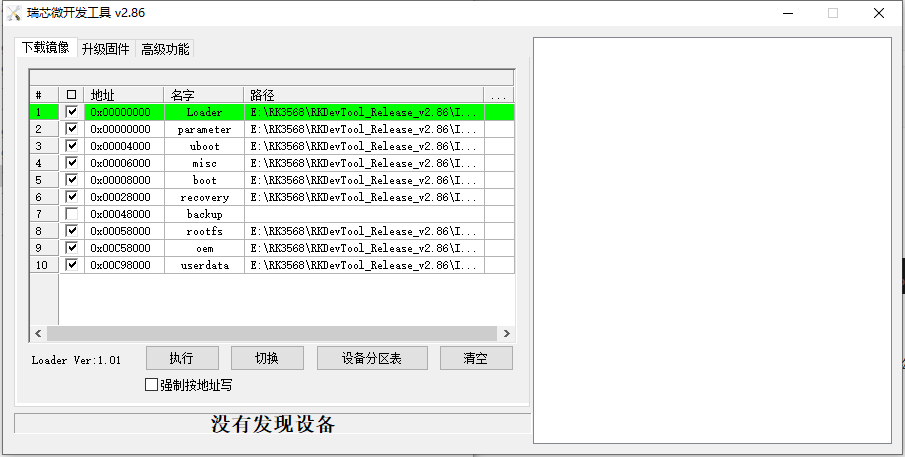
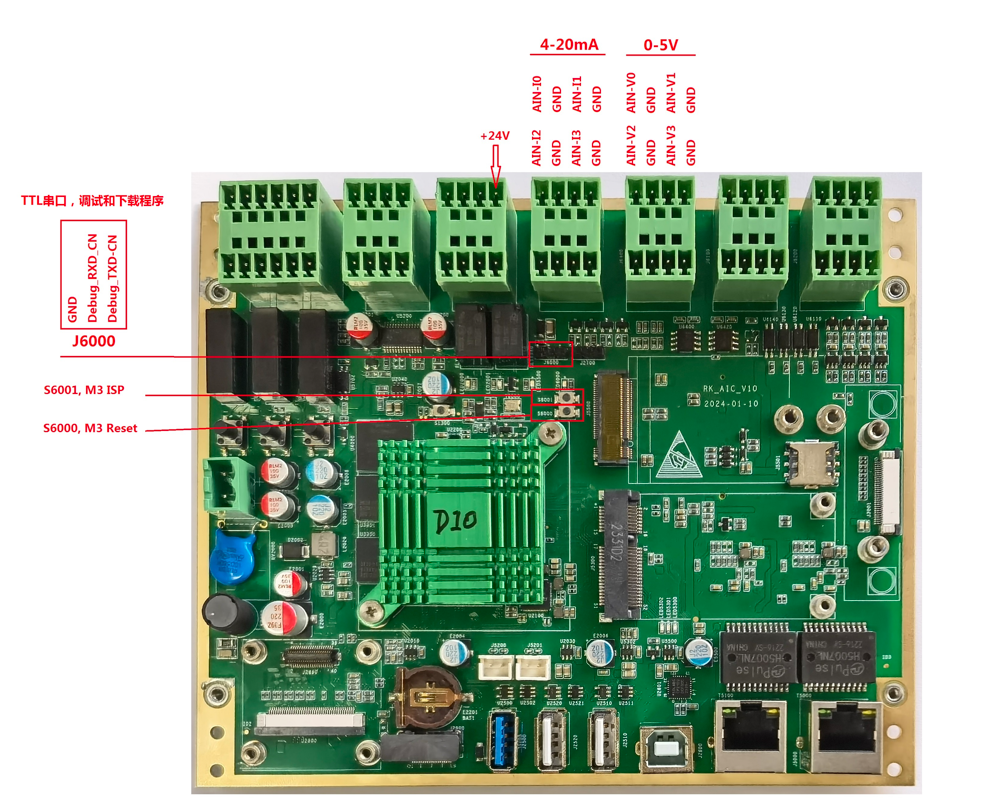
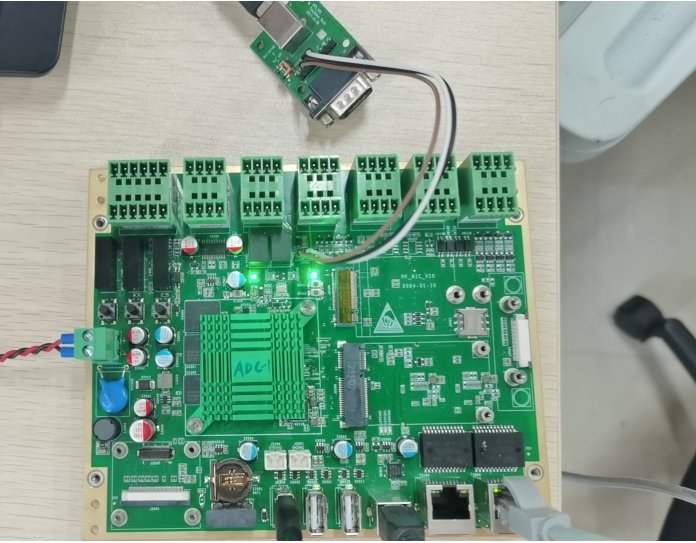
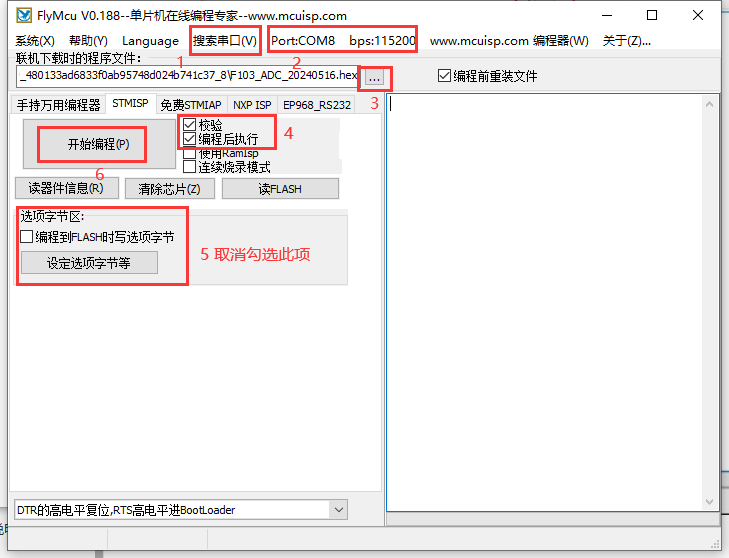
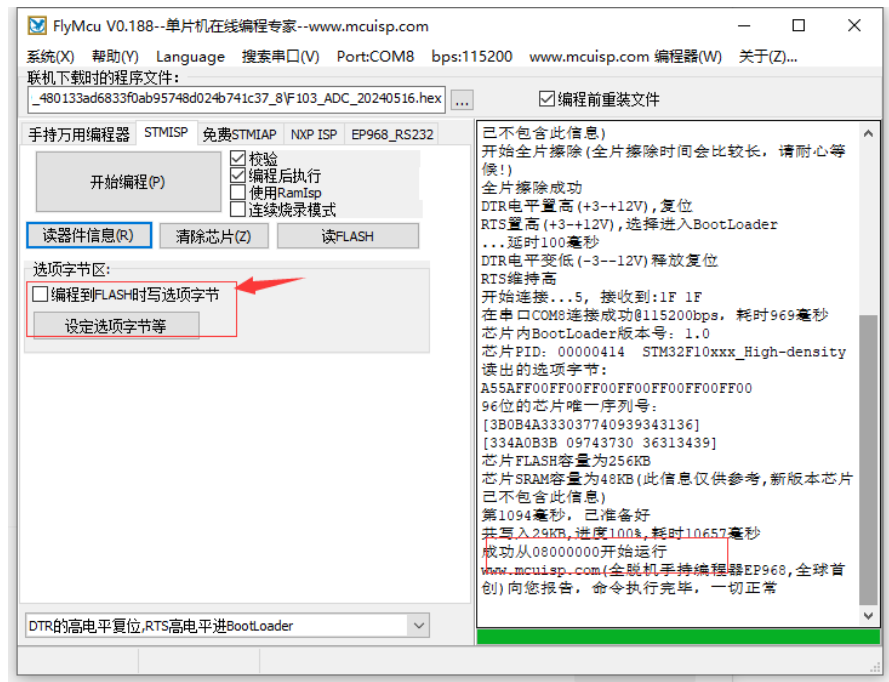
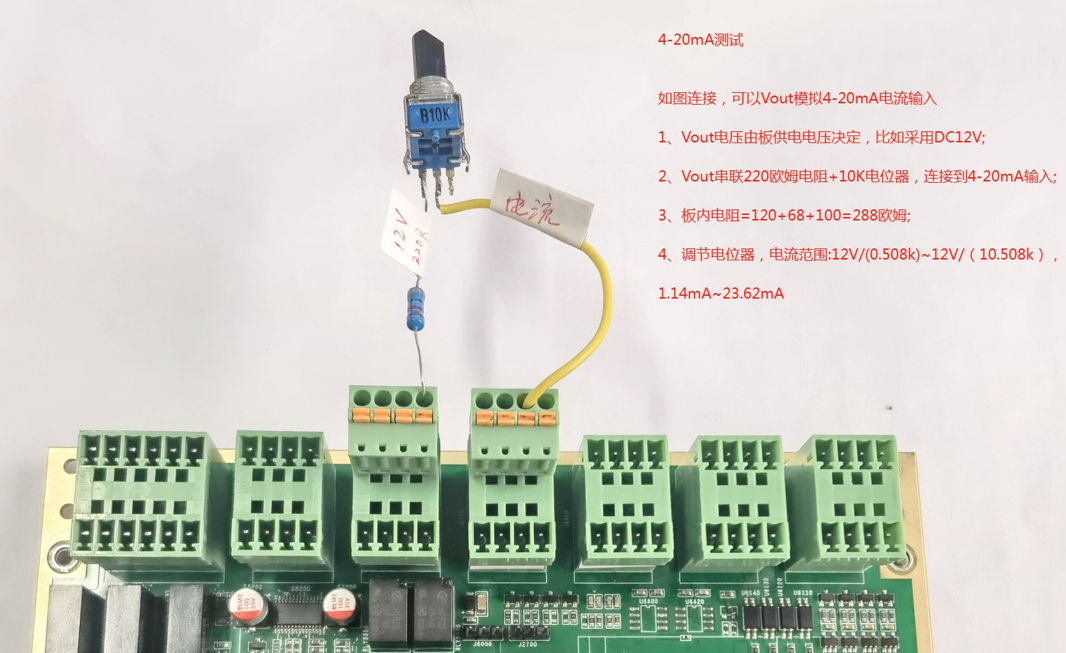
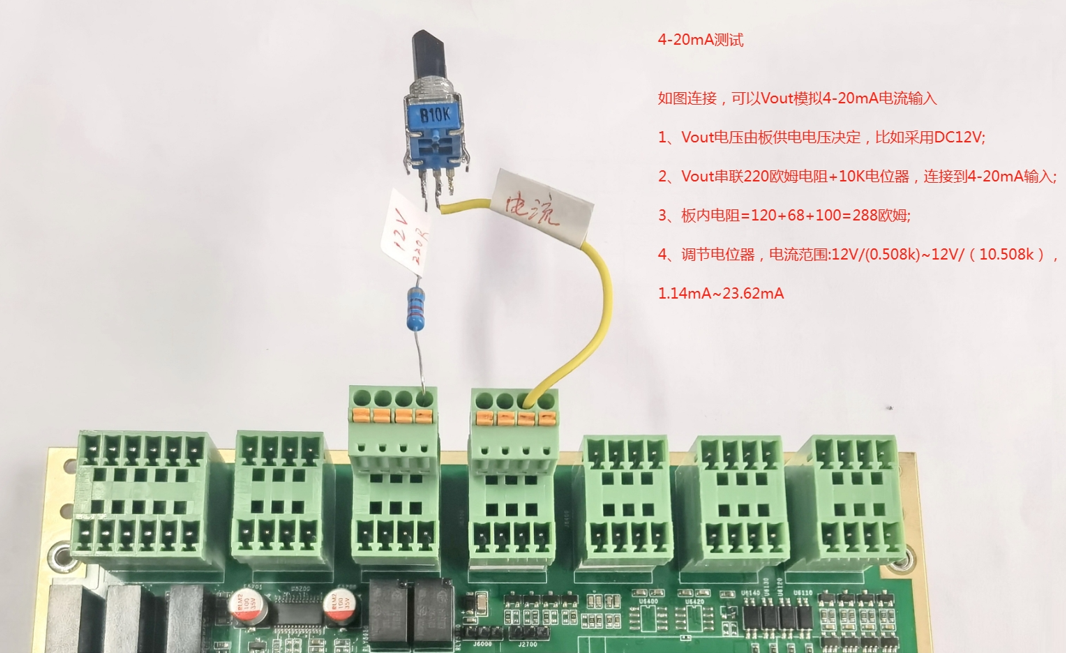
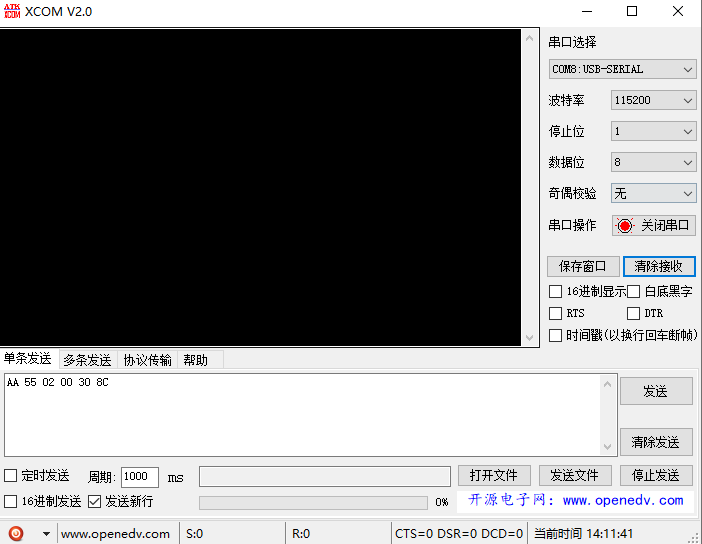
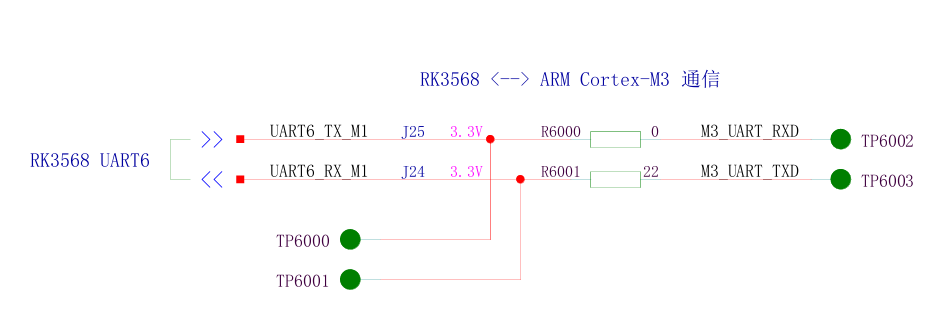
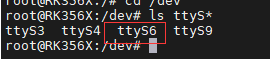
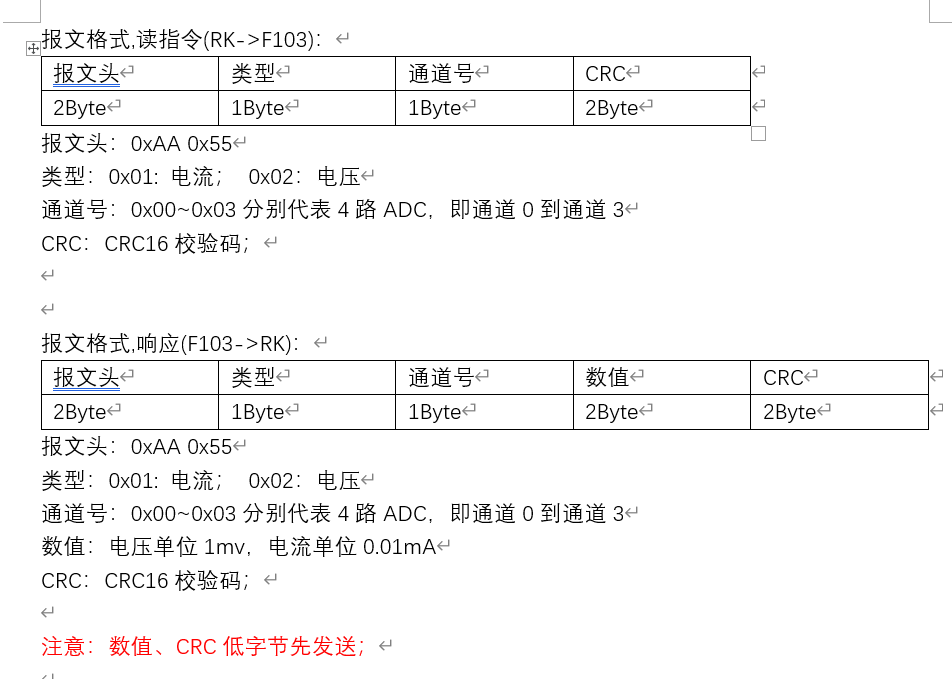
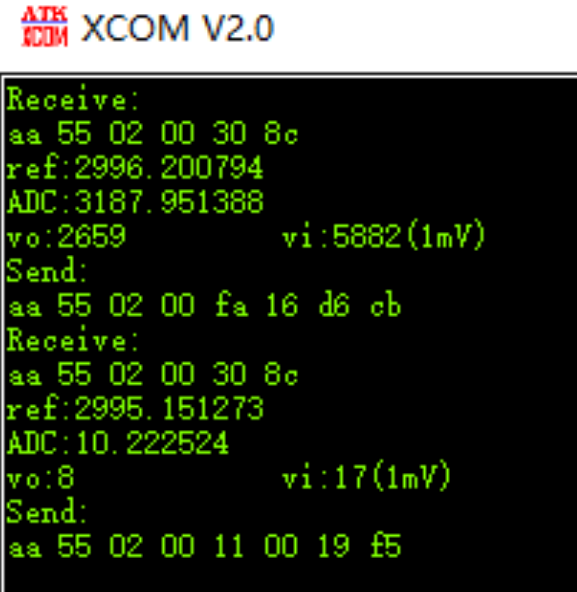
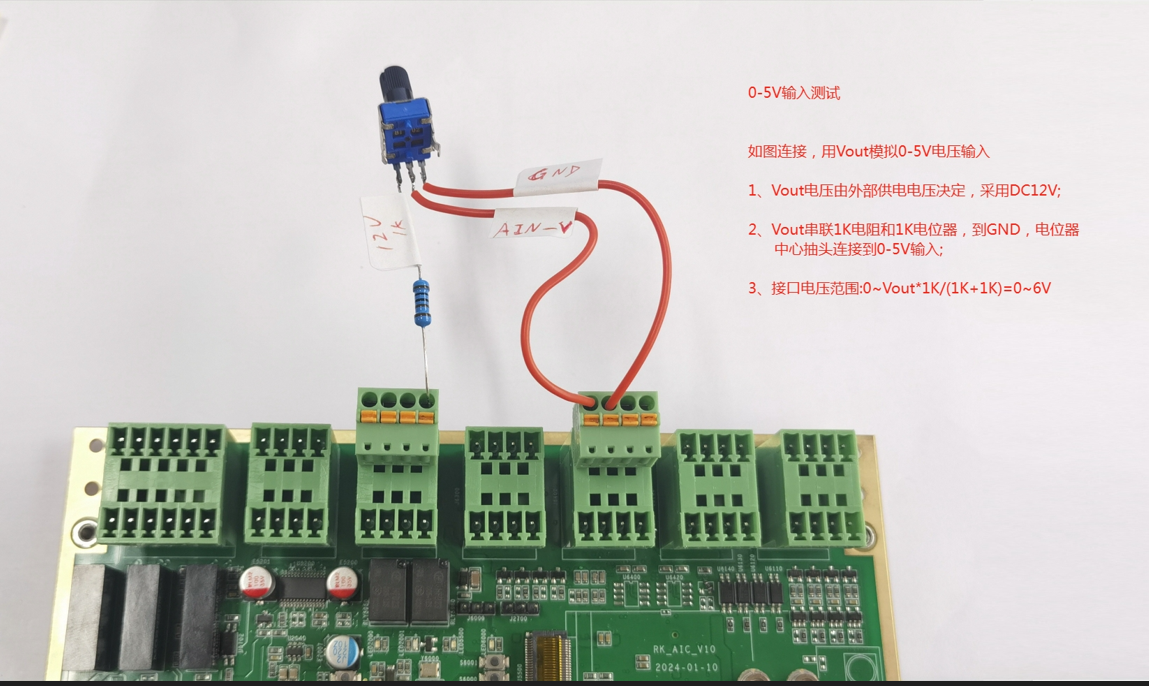
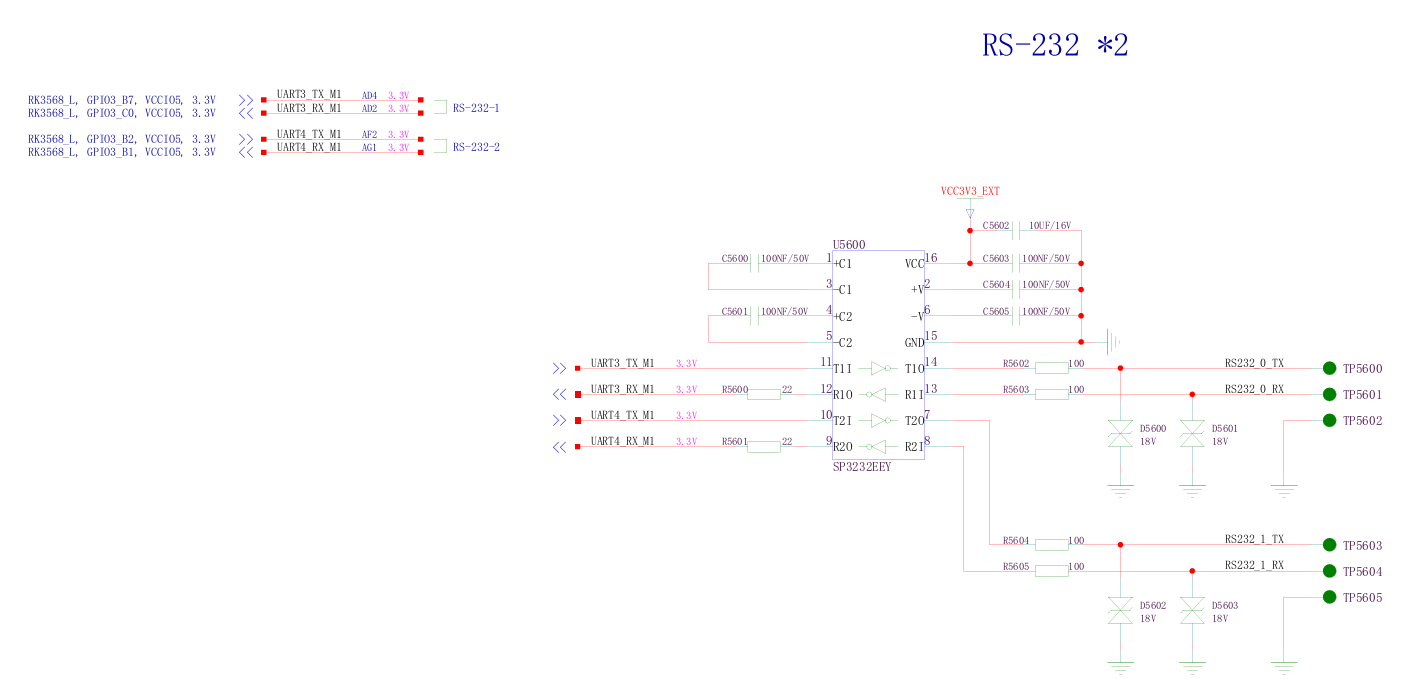
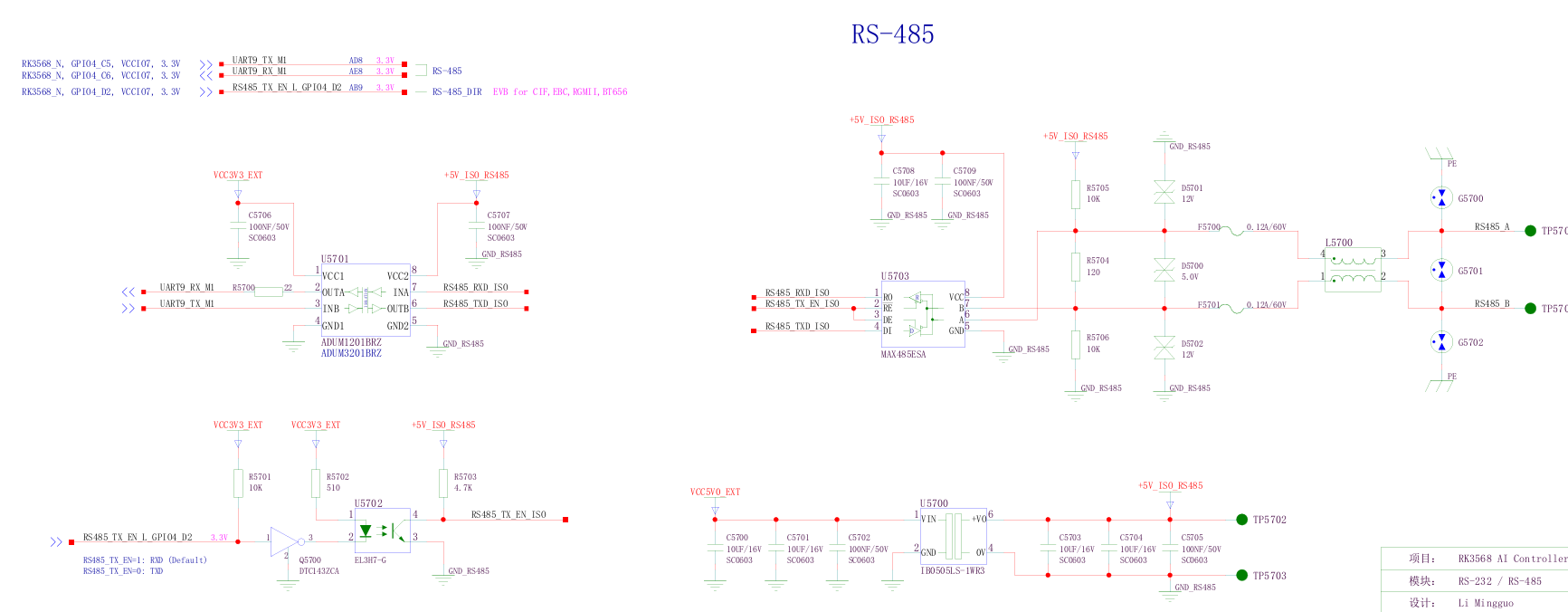
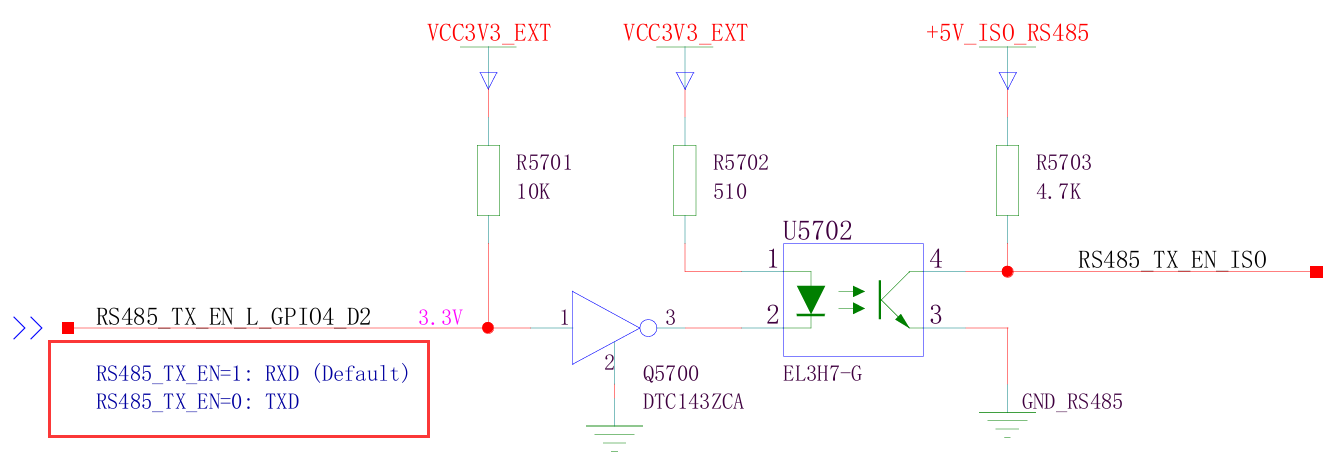
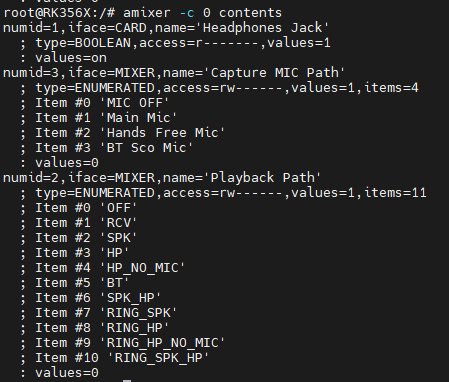
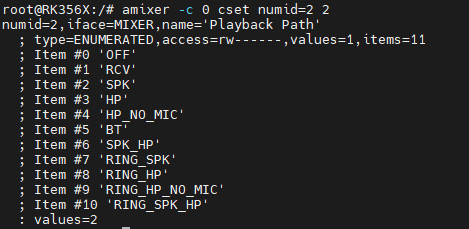
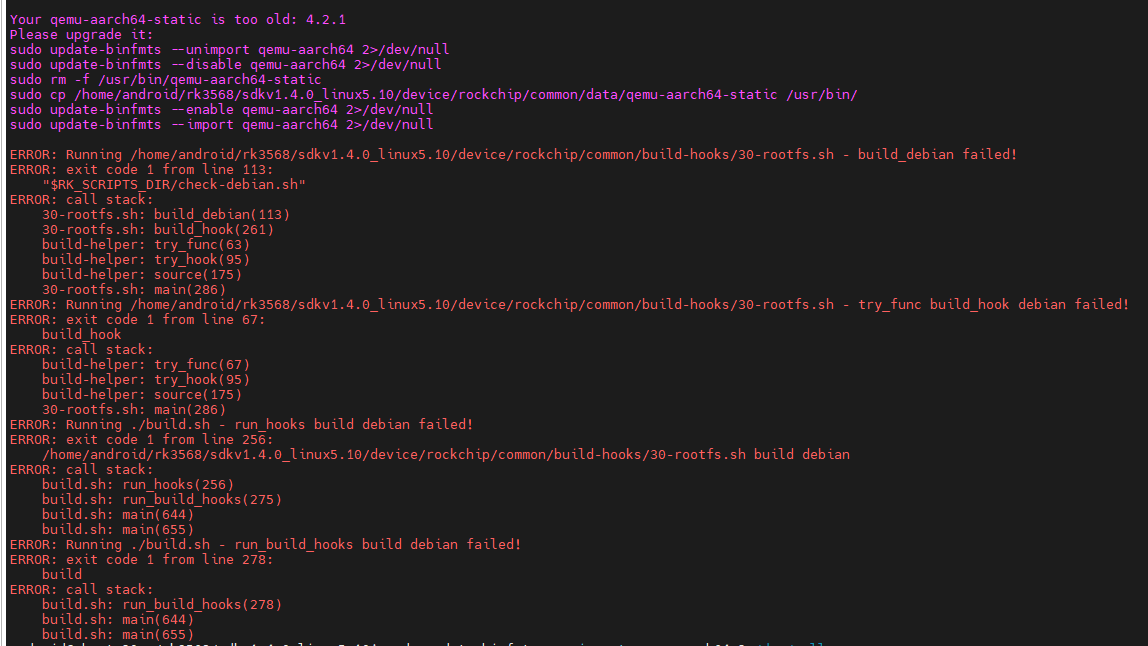
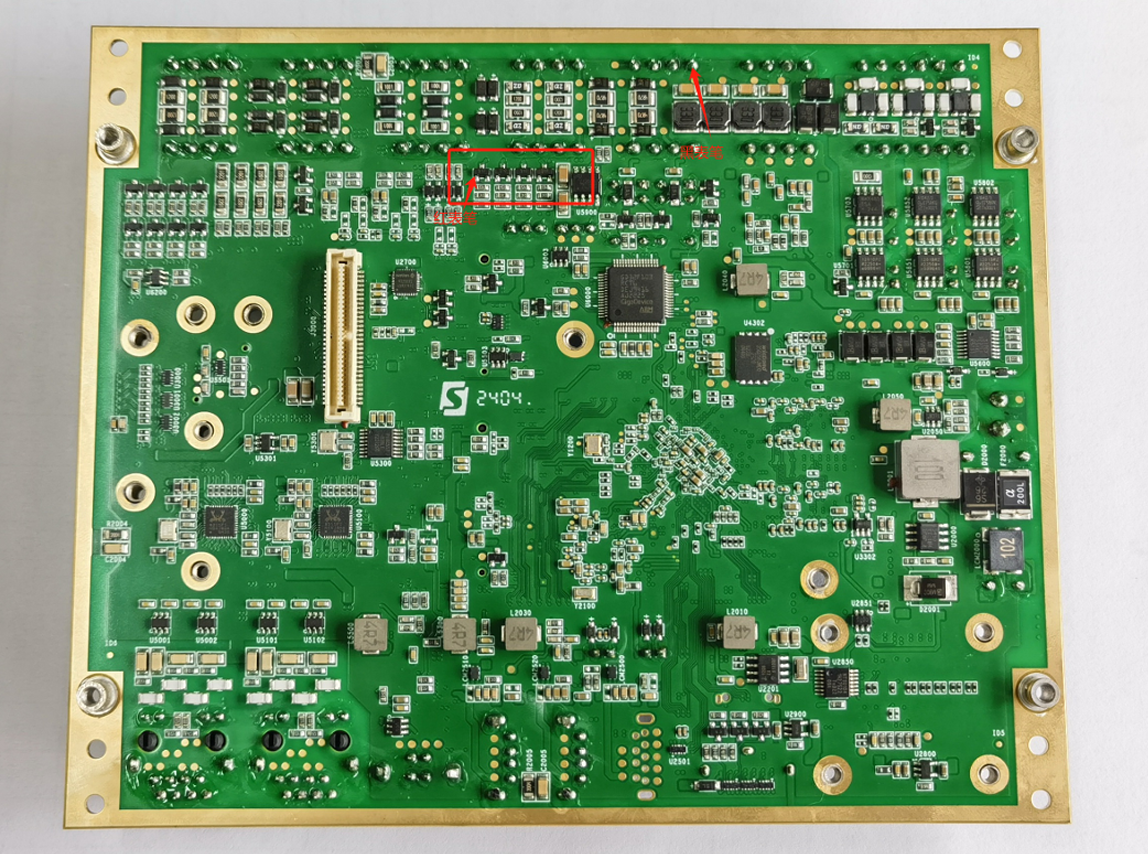
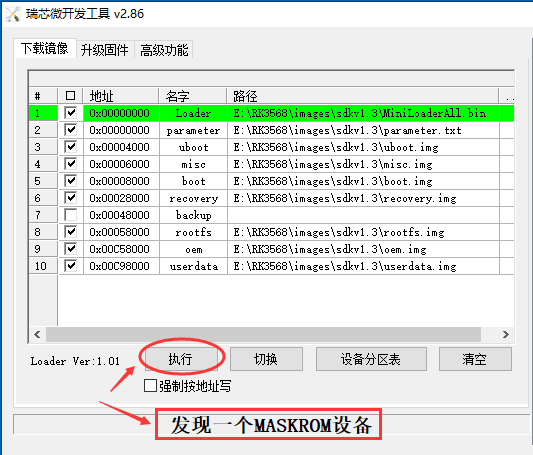
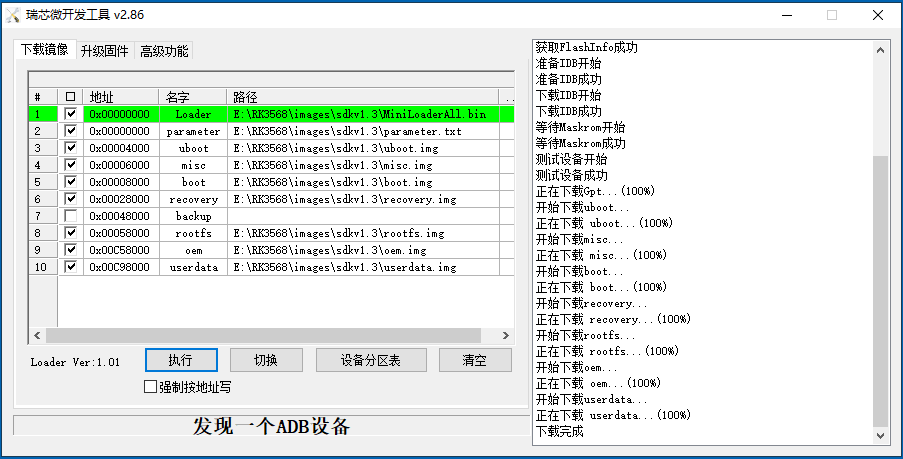
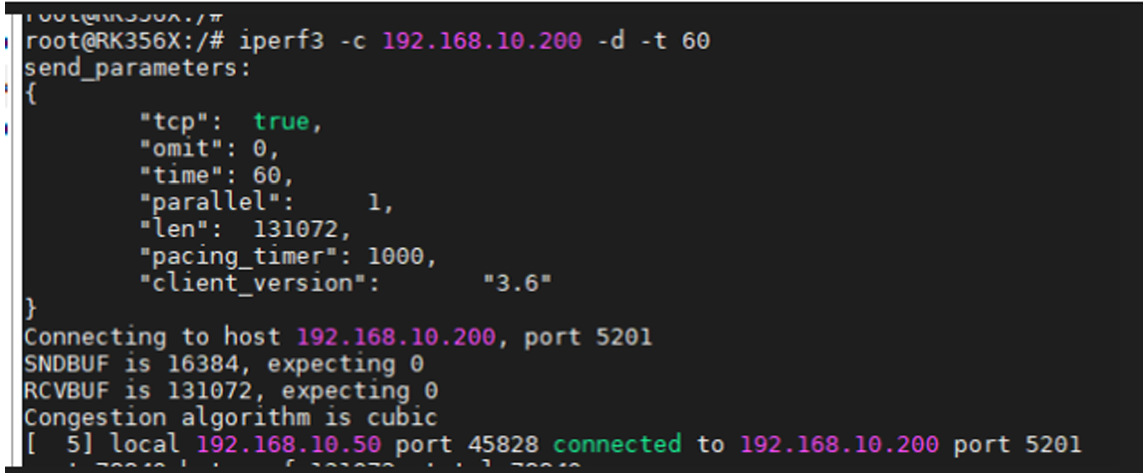
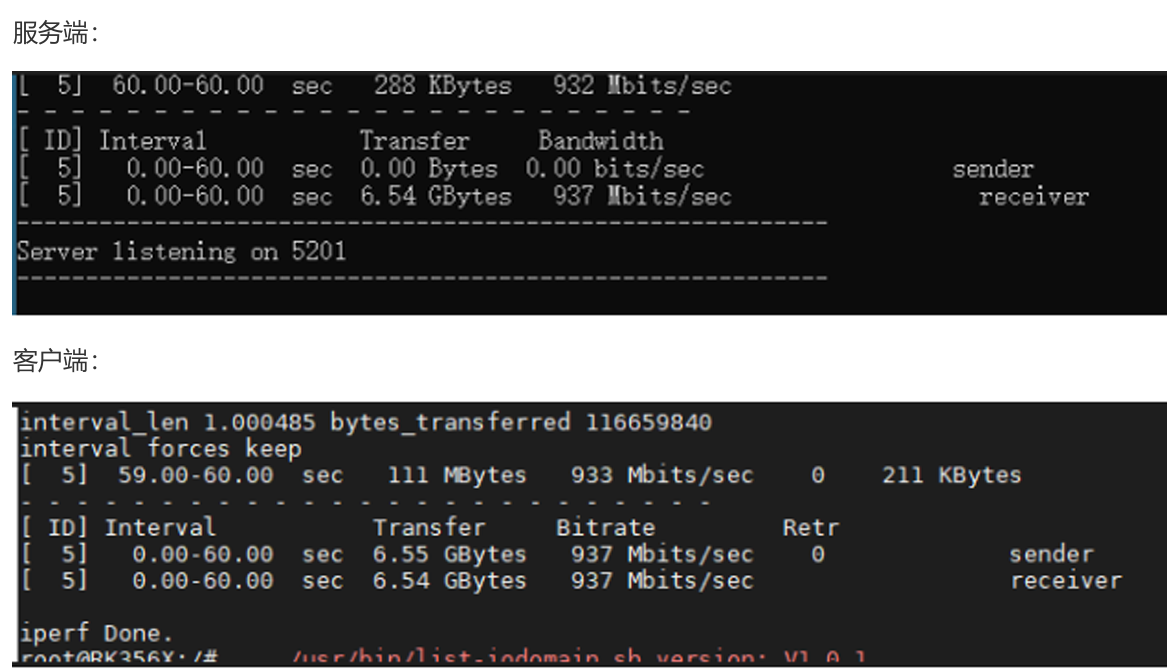
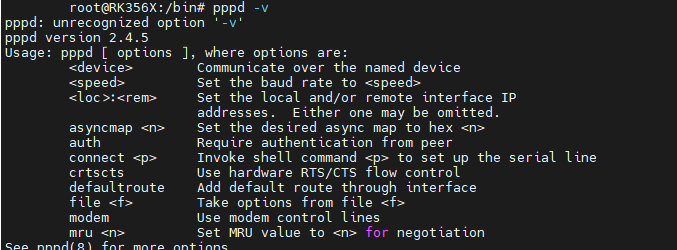
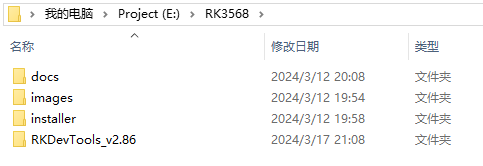
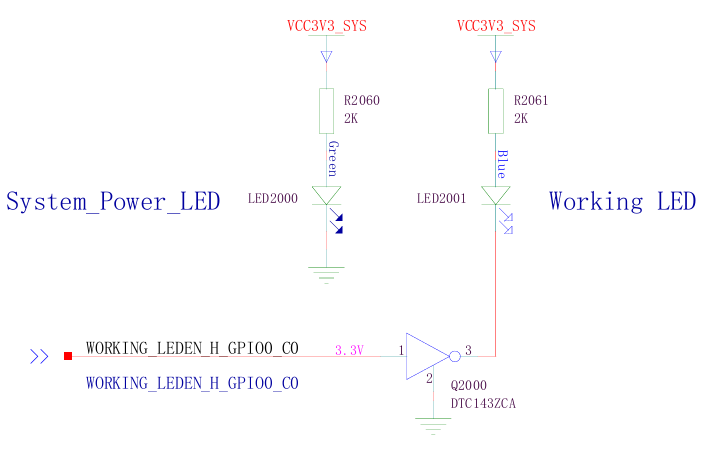
New file @@ -0,0 +1,1721 @@ # 1. 源码编译 RK3568的 Linux SDK 或 Android 源码编译对服务器要求比较高,其中: * 系统依赖 Ubuntu20 及以上; * CPU 8核+、内存32GB+ 以上; * 硬盘空间 1TB+; 推荐在凌云实验室的编译服务器上编译,IGKBoard-RK3568开发板请选择使用 ***sdkv1.3.0_linux4.19*** 版本。 ## 1.1 安装交叉编译环境 首先安装交叉编译所需要的系统命令。 ``` guowenxue@ubuntu22:~$ sudo apt install -y git ssh make gcc libssl-dev liblz4-tool \ expect g++ patchelf chrpath gawk texinfo chrpath diffstat binfmt-support unzip \ qemu-user-static live-build bison flex fakeroot cmake gcc-multilib g++-multilib \ device-tree-compiler python*-pip libncurses-dev libmpc-dev ``` 如果是 ***sdkv1.3.0_linux4.19*** 则需要将 python 的版本设置为 **python2**, 而 ***sdkv1.4.0_linux5.10*** 则需要选择 **python3**。 ``` guowenxue@ubuntu22:~$ sudo update-alternatives --install /usr/bin/python python /usr/bin/python2 1 guowenxue@ubuntu22:~$ sudo update-alternatives --install /usr/bin/python python /usr/bin/python3 2 guowenxue@ubuntu22:~$ sudo update-alternatives --config python There are 2 choices for the alternative python (providing /usr/bin/python). Selection Path Priority Status ------------------------------------------------------------ * 0 /usr/bin/python3 2 auto mode 1 /usr/bin/python2 1 manual mode 2 /usr/bin/python3 2 manual mode Press <enter> to keep the current choice[*], or type selection number: 1 guowenxue@ubuntu22:~$ python --version Python 2.7.18 ``` ## 1.2 解压缩获取SDK源码 首先创建 RK3568 开发板的项目工作路径。 ``` guowenxue@ubuntu20:~$ mkdir rk3568 && cd rk3568 ``` 如果选择 ***sdkv1.3.0_linux4.19*** 版本SDK,则可以使用下面命令从凌云实验室文件服务器上下载并解压缩。 ``` guowenxue@ubuntu22:~/rk3568$ mkdir sdkv1.3.0_linux4.19 && cd sdkv1.3.0_linux4.19 guowenxue@ubuntu22:~/rk3568/sdkv1.3.0_linux4.19$ wget http://192.168.0.2:2211/rockchip/bsp/rk3568_linuxSDK/sdkV1.3.0_linux4.19/rk356x_linux_release_v1.3.0_20220925.tgz guowenxue@ubuntu22:~/rk3568/sdkv1.3.0_linux4.19$ tar -xzf rk356x_linux_release_v1.3.0_20220925.tgz guowenxue@ubuntu22:/build/rk3568/sdkv1.3.0_linux4.19$ rm -f *.tgz ``` 如果选择 ***sdkv1.4.0_linux5.10*** 版本SDK,则可以使用下面命令从凌云实验室文件服务器上下载并解压缩。 ```bash guowenxue@ubuntu22:~/rk3568$ mkdir sdkv1.4.0_linux5.10 && cd sdkv1.4.0_linux5.10 guowenxue@ubuntu22:~/rk3568/sdkv1.4.0_linux5.10$ wget http://192.168.0.2:2211/rockchip/bsp/rk3568_linuxSDK/sdkV1.4.0_linux5.10/rk356x_linux5.10_release_v1.4.0_20231220.tgz guowenxue@ubuntu22:~/rk3568/sdkv1.4.0_linux5.10$ tar -xzf rk356x_linux5.10_release_v1.4.0_20231220.tgz guowenxue@ubuntu22:~/rk3568/sdkv1.4.0_linux5.10$ rm -f *.tgz ``` 解压缩出来的源码都在隐藏的 ***.repo*** 文件夹下,接下来我们使用 **repo** 命令将源码 checkout 出来。 ``` guowenxue@ubuntu22:/build/rk3568/sdkv1.3.0_linux4.19$ ls -a . .. .repo guowenxue@ubuntu22:/build/rk3568/sdkv1.3.0_linux4.19$ ls .repo/ manifests manifests.git manifest.xml project.list project-objects projects repo guowenxue@ubuntu22:/build/rk3568/sdkv1.3.0_linux4.19$ .repo/repo/repo sync -l Updating files: 100% (17139/17139), done./app/rkaiq_tool_serverUpdating files: 51% (8839/17139) Updating files: 100% (779/779), done.inux/buildrootUpdating files: 41% (322/779) Updating files: 100% (1171/1171), done.ux/debianUpdating files: 72% (844/1171) Updating files: 100% (248/248), done.inux/device/rockchipUpdating files: 10% (25/248) Updating files: 100% (247/247), done.inux/bsp/docsUpdating files: 45% (112/247) Updating files: 100% (1493/1493), done.ux/bsp/external/broadcom_bsaUpdating files: 41% (622/1493) Updating files: 100% (127/127), done.inux/external/libglCompositorUpdating files: 44% (56/127) Updating files: 100% (118/118), done.inux/external/rkfacialUpdating files: 29% (35/118) Updating files: 100% (921/921), done.k/rknn-toolkit2Updating files: 5% (52/921) Updating files: 100% (368/368), done.inux/external/rkupdateUpdating files: 22% (84/368) Updating files: 100% (186/186), done.inux/external/rkwifibtUpdating files: 59% (110/186) Updating files: 100% (2109/2109), done.ux/security/binUpdating files: 15% (332/2109) Updating files: 100% (33/33), done. android/rk/platform/system/rk_tee_userUpdating files: 93% (31/33) Updating files: 100% (72280/72280), done./external/uvc_appUpdating files: 3% (2631/72280) Updating files: 100% (17900/17900), done.rnelUpdating files: 34% (6102/17900) Updating files: 100% (7165/7165), done.prebuilts/gcc-buildroot-9.3.0-2020.03-x86_64_aarch64-rockchip-linux-gnuUpdating files: 13% (949/7165) Updating files: 100% (236/236), done.k/rkbinUpdating files: 46% (109/236) Updating files: 100% (13576/13576), done./toolsUpdating files: 88% (12076/13576) Checking out projects: 100% (65/65), done. repo sync has finished successfully. guowenxue@ubuntu22:/build/rk3568/sdkv1.3.0_linux4.19$ ls app buildroot build.sh debian device docs envsetup.sh external kernel Makefile mkfirmware.sh prebuilts rkbin rkflash.sh tools u-boot yocto ``` SDK 相关文档都存放 **docs** 文件夹下。 ``` guowenxue@ubuntu22:/build/rk3568/sdkv1.3.0_linux4.19$ ls docs/ Common docs_list.txt Linux Others RK356X RK_Linux_SDK_Supported_System_Kernel_Version_and_ISP_Version_List.png Rockchip_Developer_Guide_Linux_Software_CN.pdf ``` 如果选择 ***sdkv1.3.0_linux4.19*** 版本SDK,还需要从凌云实验室文件服务器上下载buildroot源码并解压缩。 ```bash guowenxue@ubuntu22:/build/rk3568/sdkv1.3.0_linux4.19$ cd buildroot/ guowenxue@ubuntu22:/build/rk3568/sdkv1.3.0_linux4.19/buildroot$ wget http://192.168.0.2:2211/rockchip/bsp/rk3568_linuxSDK/sdkV1.3.0_linux4.19/buildroot_DL/dl.zip guowenxue@ubuntu22:/build/rk3568/sdkv1.3.0_linux4.19/buildroot$ unzip dl.zip && rm -f dl.zip guowenxue@ubuntu22:/build/rk3568/sdkv1.3.0_linux4.19/buildroot$ cd .. ``` ## 1.3 Buildroot 配置 常见的文件系统制作就这几个: 1, Buildroot; 2, Yocto; 3, 直接用第三方的,如 debian、ubuntu 等 Rockchip提供的Linux 的SDK里面默认使用的Buildroot来构建根文件系统,那如果需要想让根文件系统添加一些别的命令支持则需要对Buildroot进行配置 此处以添加Python3为例说明 首先我们需要配置编译需要的配置 1.进入~/rk3568/sdkv1.3.0_linux4.19 输入`source envsetup.sh` 选择67.rockchip_rk3568 表示使用rk3568的相关配置   此时可以看到配置中显示了目标板子,编译输出目录和使用的defconfig文件是哪个 2.进入~/rk3568/sdkv1.3.0_linux4.19/buildroot 输入`make menuconfig` 找到python3,位置在Target packages ->Interpreter languages and scripting->python3选中。  选中python3后保存退出。 输入`make savedefconfig` 此时系统会把你所改变的config信息直接同步到rockchip_rk3568_defconfig 3.编译buildroot 返回~/rk3568/sdkv1.3.0_linux4.19/ 输入`./build.sh buildroot`编译buildroot 4.烧录编译出来的buildroot镜像到开发板中,输入`Python3`  ## 1.4 Debian构建根文件系统 瑞芯微的SDK中已经提供的Debian的源码,路径是~/rk3568/sdkv1.3.0_linux4.19/debian 在编译和构建Debian_rootfs之前需要在系统里安装相关工具和依赖 ``` sudo apt-get install git ssh make gcc libssl-dev liblz4-tool expect \ g++ patchelf chrpath gawk texinfo chrpath diffstat binfmt-support \ qemu-user-static live-build bison flex fakeroot cmake gcc-multilib \ g++-multilib unzip device-tree-compiler ncurses-dev ``` ``` sudo dpkg -i debian/ubuntu-build-service/packages/* sudo apt-get install -f ``` 说明: 其中最为核心的东西是debootstrap和qemu-user-static 这里的debootstrap就是在packages里面  debootstrap 构建debian基本文件子系统的工具。 qemu-user-static 在PC端非arm架构的ubuntu系统上,需要借助于qemu-arm-static工具来模拟arm环境安才可以安装arm架构下所需要的软件。 安装好这些必要工具后,就可以开始编译Debian了 返回到~/rk3568/sdkv1.3.0_linux4.19/目录 输入`./build.sh debian`开始编译,编译后的镜像文件放在了~/rk3568/sdkv1.3.0_linux4.19/debian  我们需要将linaro-rootfs.img 这个镜像文件烧录到开发板中  我们将烧录的rootfs文件替换成linaro-rootfs.img即可 烧录完成后启动开发板,会提示输入用户名和密码,这里的用户名和密码在编译脚本里写好了的均为linaro 登录后切换su用户`sudo su`,进入根目录下展示的就是Debian的根文件系统  如果使用sdkv1.4.0_linux5.10 的SDK编译debian,步骤如下 先装依赖环境 ``` sudo apt-get update && sudo apt-get install git ssh make gcc libssl-dev \ liblz4-tool expect expect-dev g++ patchelf chrpath gawk texinfo chrpath \ diffstat binfmt-support qemu-user-static live-build bison flex fakeroot \ cmake gcc-multilib g++-multilib unzip device-tree-compiler ncurses-dev \ libgucharmap-2-90-dev bzip2 expat gpgv2 cpp-aarch64-linux-gnu libgmp-dev \ libmpc-dev bc python-is-python3 python2 sudo dpkg -i debian/ubuntu-build-service/packages/* sudo apt-get install -f ``` 进入sdk根目录,运行./build.sh debian 会出现如下错误,我们只需要按照他推荐的更新一些工具就可以运行了。  ``` sudo update-binfmts --unimport qemu-aarch64 2>/dev/null sudo update-binfmts --disable qemu-aarch64 2>/dev/null sudo rm -f /usr/bin/qemu-aarch64-static sudo cp /home/android/rk3568/sdkv1.4.0_linux5.10/device/rockchip/common/data/qemu-aarch64-static /usr/bin/ sudo update-binfmts --enable qemu-aarch64 2>/dev/null sudo update-binfmts --import qemu-aarch64 2>/dev/null ``` ## 1.5 Linux SDK源码编译 首先使用下面命令选择要编译的目标开发板,SDK版本不一样,该选项的名字不一样。 ``` guowenxue@ubuntu22:/build/rk3568/sdkv1.3.0_linux4.19$ ./build.sh lunch 5. BoardConfig-rk3568-evb1-ddr4-v10.mk # sdkv1.3.0_linux4.19 选择该选项 5. rockchip_rk3568_evb1_ddr4_v10_defconfig # sdkv1.4.0_linux5.10 选择该选项 Which would you like? [0]: 5 ``` 如果需要,可以使用下面命令来彻底清除之前的编译。 ``` guowenxue@ubuntu22:~/rk3568/sdk$ ./build.sh cleanall ``` ***sdkv1.3.0_linux4.19*** 和 ***sdkv1.4.0_linux5.10*** 版本SDK 都需要修改 IO Domain 电压如下。 ``` guowenxue@ubuntu22:/build/rk3568/sdkv1.3.0_linux4.19$ vim kernel/arch/arm64/boot/dts/rockchip/rk3568-evb.dtsi ... ... ... &pmu_io_domains { status = "okay"; pmuio2-supply = <&vcc3v3_pmu>; vccio1-supply = <&vccio_acodec>; vccio3-supply = <&vccio_sd>; vccio4-supply = <&vcc_1v8>; vccio5-supply = <&vcc_3v3>; vccio6-supply = <&vcc_1v8>; vccio7-supply = <&vcc_3v3>; }; ``` 接下来运行 build.sh 脚本开始编译SDK,默认是 Buildroot 系统镜像。 ``` guowenxue@ubuntu22:/build/rk3568/sdkv1.3.0_linux4.19$ ./build.sh ``` 也可以通过设置坏境变量 **RK_ROOTFS_SYSTEM** 指定不同 rootfs。 **RK_ROOTFS_SYSTEM** ⽬前可设定三种系统:***buildroot、debian、 yocto***。 ```bash guowenxue@ubuntu22:/build/rk3568/sdkv1.3.0_linux4.19$ RK_ROOTFS_SYSTEM=yocto ./build.sh ``` 如果是 ***sdkv1.3.0_linux4.19*** 在编译 Linux内核时需要做如下选择。 ``` 编译内核过程弹窗的电压选择如下: 3300000 PMUIO2 Supply Power Voltage(uV) 3300000 VCCIO1 Supply Power Voltage(uV) 3300000 VCCIO3 Supply Power Voltage(uV) 1800000 VCCIO4 Supply Power Voltage(uV) 3300000 VCCIO5 Supply Power Voltage(uV) 1800000 VCCIO6 Supply Power Voltage(uV) 3300000 VCCIO7 Supply Power Voltage(uV) ... ... ... ``` 编译生成的文件将放在 **rockdev** 文件夹下。 ``` guowenxue@ubuntu22:/build/rk3568/sdkv1.3.0_linux4.19$ ls rockdev/ boot.img linux-headers.tar MiniLoaderAll.bin misc.img oem.img parameter.txt recovery.img rootfs.img uboot.img update.img userdata.img ``` # 2. 系统烧录 ## 2.1 开发板烧录连接 如下图所示:  * 使用 12V/1A 的电源给开发板供电; * 使用两端都是 TypeA接口的USB线连接开发板上的USB3.0接口到自己的PC上,该USB接口为系统烧录口; * 使用 TypeB 接口的USB线连接开发板上的 Console 调试串口到自己的PC上; ***注: 开发板上电时,可以听到继电器上电后的咔嚓切换声音。*** ## 2.2 烧录软件下载 将编译SDK生成的镜像文件(rockdev文件夹)下载到 Windwos下的相应路径下,如:  从凌云实验室文件服务器上下载并安装下面烧录软件。 * [CP210x_VCP_Windows.zip](http://studio.iot-yun.club:2211/rockchip/tools/CP210x_VCP_Windows.zip) 解压缩并安装开发板的Console调试串口驱动; * [DriverAssitant_v5.1.1.zip](http://studio.iot-yun.club:2211/rockchip/tools/DriverAssitant_v5.1.1.zip) , 解压缩安装RK3568开发板驱动; * [RKDevTool_Release_v2.86.zip](http://studio.iot-yun.club:2211/rockchip/tools/RKDevTool_Release_v2.86.zip) ,直接解压缩即可运行的 RK3568开发板烧录软件; 下面是我 Windows下的开发板项目目录结构:  * **docs** 存放开发板相关文档、芯片datasheet等; * **images** 存放开发板编译出来系统镜像; * **installer** 项目相关的安装软件; * **RKDevTools_v2.86** RK3568开发板烧录软件; 双击运行 ***RKDevTools_v2.86*** 文件夹下的 **RKDevTool.exe** 可执行文件, 在下载镜像页面配置各个镜像文件及其烧录地址如下:  ## 2.3 Maskrom烧录模式 如果我们想烧录或更新系统镜像,必须要让CPU进入到 Maskrom 烧录模式。在RK3568开发板上,我们可以分别按住开发板上的不同按键进入到 Maskrom 烧录模式。下面是开发板上的各个按键说明: | 按键 | 作用 | 备注 | | ------ | -------------- | -------------------------------------- | | SW2101 | RK809_PWRON | 长按8秒左右关机,再按开机 | | S1300 | A核Maskrom按键 | 按住该键+复位键系统将进入到MASKROM模式 | | SW1501 | Recovery Key | 按住该键+复位键系统将进入到Loader模式 | | SW2100 | RESETN | A核复位按键 | | S6000 | M3核复位按键 | M核复位按键 | | S6001 | M3核ISP按键 | 按下复位M核将进入UART ISP模式 | ### 2.3.1 按住 Maskrom 按键进入 如下图所示,将开发板上电后,按住 **S1300(Maskrom)按键** 同时,然后 **按下并释放 SW2100(Reset)按键** 将开发板重启,接下来 **再释放S1300按键**,这时候CPU将会进入到 **Maskrom模式**,在该模式下我们可以烧录或升级系统镜像。  下面是开发板上的各个按键说明: | 按键 | 作用 | 备注 | | ------ | -------------- | -------------------------------------- | | SW2101 | RK809_PWRON | 长按8秒左右关机,再按开机 | | S1300 | A核Maskrom按键 | 按住该键+复位键系统将进入到MASKROM模式 | | SW1501 | Recovery Key | 按住该键+复位键系统将进入到Loader模式 | | SW2100 | RESETN | A核复位按键 | | S6000 | M3核复位按键 | M核复位按键 | | S6001 | M3核ISP按键 | 按下复位M核将进入UART ISP模式 | 此时在 **RKDevTool.exe** 软件底行会显示 “**发现一个MASKROM设备**” 。  ### 2.3.1 按住 Recovery 按键进入 如下图所示,将开发板上电后,按住 **SW1501(Recovery)按键** 同时,然后 **按下并释放 SW2100(Reset)按键** 将开发板重启,**继续SW1501(Recovery)按键 8秒后释放**,这时候CPU将会进入到 **Loader 模式**,在该模式下我们可以烧录或升级系统镜像。  此时在 **RKDevTool.exe** 软件底行会显示 “**发现一个LOADER设备**”。  接下来切换到 “**高级功能**” 菜单下,并点击 “**进入Maskrom**” 按钮,这时候将会切换到 “**Maskrom**” 模式。  ## 2.4 系统烧录与启动 在 **RKDevTool.exe** 烧录软件上,确认设备已经进入到 Maskrom模式后,点击上面的 **“执行”** 按钮。  此时将会开始烧录系统镜像到开发板上,烧录完成后系统将会自动重启,系统启动后将会提示 “**发现一个ADB设备**”。  烧录完成第一次启动后,系统将会自动初始化。初始化完成之后将会再次重启,此时可以使用 Console 串口上登录到开发板的 Linux 系统中去。  # 3. 外设调试与测试 ## 3.1 系统心跳灯 ### 3.1.1 内核修改支持 原理图  DTS文件修改(默认已经添加节点) ``` leds: leds { compatible = "gpio-leds"; work_led: work { gpios = <&gpio0 RK_PC0 GPIO_ACTIVE_HIGH>; linux,default-trigger = "heartbeat"; status = “okay” }; }; ``` 内核make menuconfig配置(默认已使能) ``` Device Drivers -> LED Support -> LED Support for GPIO connected LEDs ``` ``` Device Drivers -> LED Support -> LED Trigger support -> LED Heartbeat Trigger ``` ### 3.1.2 应用程序测试 设置好config之后重新编译内核并烧到开发板中,当系统启动时就会看到蓝色led灯闪烁。 ## 3.2 RGB灯和蜂鸣器扩展接口 ### 3.2.1 内核修改支持 原理图及分析  这里的测试只要就是对这些gpio进行配置即可,利用gpioset来控制高低电平 **注意:这四个gpio在设备树中可能会被其他设备所占用,导致不能操作gpio,所以要查看哪些设备占用着这几个gpio需要屏蔽掉这些设备。** ### 3.2.2 应用程序测试 由于这四个引脚都是用MOS管控制的开漏输出,所以我们需要去测试MOS管的栅极看看是否是3.3V电平 **规则:** **GPIO输出1的时候,对应的栅极是0V** **GPIO输出0的时候,对应的栅极是3.3V** ```c gpioset 0 18=1/0 gpioset 0 20=1/0 gpioset 0 22=1/0 gpioset 3 21=1/0 ``` 利用万用表,将万用表调到直流电压20V这一档,这四个模块对应的三极管如下图所示,利用gpioset来控制四个gpio的高低电平,看看是否符合上述规则。  ## 3.3 RTC芯片 ### 3.3.1 内核修改支持 内核make menuconfig配置 默认已使能 ``` Device Drivers -> Real Time Clock -> Rockchip RK805/RK808/RK809/RK816/RK817/RK818 RTC -> ``` ### 3.3.2 应用程序测试 输入命令: ``` date -s "2024-04-01 11:40:00" ```  设置完成后再次使用`date`命令查看一下当前时间就会发现时间改过来了 大家注意我们使用`date -s`命令仅仅是修改了当前时间,此时间还没有写入到RK809内部 RTC 里面或其他的 RTC 芯片里面,因此系统重启以后时间又会丢失。我们需要将当前的时间写入到 RTC 里面,这里要用到`hwclock` 命令,输入如下命令将系统时间写入到 RTC 里面: ``` hwclock -w /将当前系统时间写入RTC里面/ ``` 时间写入到 RTC 里面以后就不怕系统重启以后时间丢失了 间隔时间输入如下命令: ``` hwclock -r /读取当前系统时间/ ```  发现当前系统时间在走动,系统时间正常。 ## 3.4 RS232和RS485 ### 3.4.1 硬件原理图说明    ### 3.4.2 内核修改支持 RS232 DTS文件修改 ```c &uart3{ dma-names = "tx", "rx"; pinctrl-names = "default"; pinctrl-0 = <&uart3m1_xfer>; status = "okay"; }; &uart4{ dma-names = "tx", "rx"; pinctrl-names = "default"; pinctrl-0 = <&uart4m1_xfer>; status = "okay"; }; ``` RS485 DTS文件修改 ```c &uart9 { pinctrl-names = "default"; pinctrl-0 = <&uart9m1_xfer &rs485_ctrl>; status = "okay"; }; &pinctrl { rs485 { rs485_ctrl: rs485-ctrl { rockchip,pins = <4 RK_PD2 RK_FUNC_GPIO &pcfg_pull_none>; }; }; }; ``` 因为RS485是半双工的,所以要么先测接收功能要么测发送功能,从原理图上可以看到,接受与发送功能的切换是GPIO4_D2来控制的,默认情况是发送功能,我们可以利用gpioset命令拉高该gpio让其工作在接受模式 ### 3.4.3 应用程序测试 RS232测试 在/dev目录下的ttyS3和ttyS4为两路RS232设备,使用microcom 命令可以操作232串口。具体测试如下 将两个232设备的RX和TX口用杜邦线进行连接,如下图所示  连接好之后我们在设备1和设备2上均输入 ```c microcom /dev/ttyS3 -s 115200 ``` 测试结果   由于microcom没有回显,所以看不到自己发送的是什么,但是接受的结果是没错的 RS485测试接受功能 如图所示,利用TTL转RS485模块来作为另外一台RS485设备,连线如下图所示  ``` microcom /dev/ttyS9 -s 115200 ```  RS485测试发送功能 将控制引脚拉高电平,输入如下命令 ```c gpioset 4 26=1 ``` ``` microcom /dev/ttyS9 -s 115200 ``` ## 3.5 CAN总线 ### 3.5.1 内核修改支持 DTS文件修改 ```c &can0 { compatible = "rockchip,can-1.0"; assigned-clocks = <&cru CLK_CAN0>; assigned-clock-rates = <150000000>; pinctrl-names = "default"; pinctrl-0 = <&can0m1_pins>; status = "okay"; }; &can1 { compatible = "rockchip,can-1.0"; assigned-clocks = <&cru CLK_CAN1>; assigned-clock-rates = <150000000>; pinctrl-names = "default"; pinctrl-0 = <&can1m1_pins>; status = "okay"; }; ``` 内核make menuconfig配置 ``` Networking support -> CAN bus subsystem support -> CAN Device Drivers -> <*>Platform CAN drivers with Netlink support <*>Rockchip CAN controller <*>Rockchip CANFD controller ``` ### 3.5.2 应用程序测试 我们可以用ifconfig -a来查看can的数量,如下图所示  这里我们测试can1的收发功能,can0与之完全相同 首先我们将两个can设备利用杜邦线进行连接,连接如下图所示  连接好之后,我们需要对can1进行配置,利用ip命令 ```c ip link set can1 down //关闭 can 网络 ip link set can1 up type can bitrate 800000 //设置 can1 的波特率为 800kbps,can 网络波特率最大值为 1mbps ip link set can1 up type can //打开 can 网络 ``` 设置好之后,我们上图所示中的设备1作为接受方,设备2作为发送方 在设备1上输入 ```c candump can1 ``` 在设备2上输入 ```c cansend can1 123#01020304050607 ``` 结果如图所示  **CAN单板回环测试** 将板子的CAN0_H和CAN1_H连接 CAN0_L和CAN1_L连接 依次输入以下命令 ``` ip link set can0 down ip link set can0 type can bitrate 500000 ip link set can0 up ip link set can1 down ip link set can1 type can bitrate 500000 ip link set can1 up candump can0 & cansend can1 123#01020304050607 ``` 通过CAN1发送后,CAN0会打印收到的信息  ## 3.6 声卡Codec ### 3.6.1 内核修改支持 原理图及分析  GPIO管脚设置 从原理图可以看出,GPIO3_C3管脚默认值是1,即关闭状态,我们要将其值设置为0 输入命令: ``` root@RK356X:/usr/share/sounds# gpioset 3 19=0 ``` 再输入命令,进行查看确认: ``` root@RK356X:/usr/share/sounds# gpioget 3 19 0 ``` ### 3.6.2 应用程序测试 J5950端子上部为音频功放输出端口 实物图连接:  将.wav格式音乐拷贝到开发板/usr/share/sounds目录下,如图:  使用amixer设置声卡 通过`amixer -c 0 contents`可以查看音频硬件的当前状态和可能的设置  这里的 1 和 2 对应于 `Main Mic` 和 `SPK` 在各自列表中的索引。根据需要调整命令中的索引以设置所需的选项。 可以使用如下命令切换至SPK输出 ``` amixer -c 0 cset numid=2 2 //linux5.10 amixer -c 0 cset numid=12 3 //HP输出 ```  使用aplay播放WAV格式音乐 ``` aplay /usr/share/sounds/C400004a29p81sntRV.wav ``` 如果一切设置正常的话就会开始播放音乐。 ## 3.7 内存压力测试 点击 [下载地址](https://pyropus.ca./software/memtester/),即可下载memtester。 编译方法1: 打开终端进入到该路径下,输入解压命令: ``` tar xzvf memtester-4.6.0.tar.gz ``` 进入到解压出来的文件夹后打开conf-cc文件,行首更改如下,并保存 ``` ~/rk3568/sdkv1.3.0_linux4.19/buildroot/output/rockchip_rk3568/host/usr/bin/aarch64-buildroot-linux-gnu-cc -O2 -DPOSIX -D_POSIX_C_SOURCE=200809L -D_FILE_OFFSET_BITS=64 - ``` 打开conf-ld文件,行首更改如下,并保存 ``` ~/rk3568/sdkv1.3.0_linux4.19/buildroot/output/rockchip_rk3568/ host/usr/bin/aarch64-buildroot-linux-gnu-cc -s ``` 在memtester-4.6.0路径下,进行编译: ``` sudo make ``` 编译之后,进行安装: ``` sudo make install ``` 编译方法2: 可以使用郭工的编译脚本进行编译,只需修改脚本的编译目标即可 安装完成后,会在memtester-4.6.0路径下生成memtester可执行文件,将memtester执行文件传到RK3568开发板中,给予memtester权限 ``` chmod 777 memtester ``` 输入`free -h`查看开发版剩余空间,可以看到还剩余3.6G  输入命令(3.6G=3687M,跑3轮),即可测试 ``` ./memtester 3687 3 ``` ## 3.8 网卡压力测试 ### 3.8.1 内核修改支持 **Iperf下载** iperf官网:[iperf.fr](https://iperf.fr/) iperf源码下载地址:[https://github.com/esnet/iperf](https://github.com/esnet/iperf) Windows版本二进制文件下载:[32位&64位](https://iperf.fr/iperf-download.php#windows) Linux系统terminal终端下载指定版本: 1.执行git clone [https://github.com/esnet/iperf.git](https://github.com/esnet/iperf.git) 默认下载最新版本。 2.cd iperf-3.x 进入目录,执行git tag查看历史版本。 3.执行git checkout 3.1.3 回退到3.1.3的历史版本。 **网络连接和IP配置** 服务端与客户端的网口通过网线和交换机连接,两者IP需要保持在同一网段,如下所示: Windows系统终端:192.169.10.200 Linux系统终端:192.168.10.50 **服务端iperf的安装与使用** 关闭Windows系统的防火墙与杀毒软件或允许iperf通过防火墙。 拷贝iperf-3.0.11-win32.rar并解压至Windows系统的的英文路径的目录(如D盘根目录)。 按"win + R"打开Dos窗口,执行“d:” 进入D盘,再执行“cd iperf-3.0.11-win32”进入iperf3.exe所在目录。 执行iperf3 -s 运行iperf作为服务端  **客户端iperf的安装与使用** 直接使用郭工安装库脚本文件build.sh,并做修改 ```c 1 #!/bin/bash 2 3 # library name and version 4 # Official: https://git.kernel.org/pub/scm/libs/libgpiod/libgpiod.git 5 LIB_NAME=iperf 6 PACK_SUFIX=tar.gz 7 8 # LingYun source code FTP server 9 LY_FTP=http://main.iot-yun.club:2211/src/ 10 11 # library download URL address 12 LIB_URL=$LY_FTP 13 14 # Cross compiler for cross compile on Linux server 15 #CROSS_COMPILE=~/rk3568/sdkv1.3.0_linux4.19/buildroot/output/ rockchip_rk3568/host/bin/aarch64-buildroot-linux-gnu- 16 CROSS_COMPILE=/opt/gcc-aarch64-10.3-2021.07/bin/aarch64-none-linux-gnu- 17 # compile jobs 18 JOBS=`cat /proc/cpuinfo |grep "processor"|wc -l` 19 20 # this project absolute path 21 PRJ_PATH=$(cd $(dirname "${BASH_SOURCE[0]}") && pwd) 22 23 # top project absolute path 24 TOP_PATH=$(realpath $PRJ_PATH/..) 25 26 # binaries install path 27 PREFIX_PATH=$TOP_PATH/install 28 BIN_PATH=$PREFIX_PATH/bin 29 LIB_PATH=$PREFIX_PATH/lib 30 INC_PATH=$PREFIX_PATH/include 31 ...... 155 function do_build() 156 { 157 cd $LIB_NAME 158 159 do_export 160 161 echo "ac_cv_func_malloc_0_nonnull=yes" > arm-linux.cache 162 ./configure --prefix=${PREFIX_PATH} ${CONFIG_CROSS} --enable-static 163 check_result "ERROR: configure ${LIB_NAME} failure" 164 165 make -j ${JOBS} && make install 166 check_result "ERROR: compile ${LIB_NAME} failure" 167 } ...... ``` 执行脚本文件,自动安装下载 ``` ./build.sh ``` 在/install/bin,生成可执行文件 iperf3 ``` lingyun@9d57f9229b66:~/install/bin$ ls gpiodetect gpiofind gpioget gpioinfo gpiomon gpioset iperf3 ``` 将 iperf3拷贝到开发板 **测试TCP** 在Linux终端执行 ``` iperf3 -c 192.168.10.200 -d -t 60 ```  测试结果  ## 3.9 继电器 ### 3.9.1 内核修改支持 原理图及分析  ### 3.9.2 应用程序测试 利用gpioset来控制继电器的开与关,当我们设置这两个gpio的电平时会听到继电器发出“咔嚓”的声音,此时证明继电器是正常的。 例如输入 ```c gpioset 3 28=0 gpioset 3 28=1 ``` ## 3.10 4G模块 ### 3.10.1 内核修改支持 原理图及分析  内核配置 ``` Device Drivers -> [*] Network device support -> <*> PPP (point-to-point protocol) support -> <*> PPP BSD-Compress compression -> <*> PPP Deflate compression [*] PPP filtering <*> PPP MPPE compression (encryption) [*] PPP multilink support <*> PPP over Ethernet <*> PPP support for async serial ports <*> PPP support for sync tty ports ``` ### 3.10.2 应用程序测试 **开机方式** 首先操作GPIO,给4G模块上电 **(注意:开关机按键,复位按键,在开发板上是MPU的GPIO出来后,硬件做了反向的。低电平,上电 低脉冲,复位)** 输入如下命令 ``` gpioset 3 0=0 gpioset 3 1=0 ``` 将这两个引脚拉低后,模块上电如下所示  **关机方式** 1. 软件方式关机 先发送AT+QPOWD命令给模块,再拉高引脚 ``` microcom /dev/ttyUSB3 -s 115200 AT+QPOWD ``` 按住Ctrl+x,再输入如下命令 ``` gpioset 3 1=1 ``` **(注意:在发送AT命令后需要在几秒内拉高gpio引脚,否则模块会再次开启)**  2. 硬件方式关机 先拉低RESET大于100ms后,拉低电源引脚Power_on 硬件关机时序如下图所示:  当4G模块上电后,可以在dev目录下看到四个ttyUSB设备  我们可以使用microcom命令对串口发送AT命令 ```c microcom /dev/ttyUSB3 -s 115200 ```  检测手机卡是否在位 AT+CPIN?  网络运行商名称 AT+COPS?  CHN-CT 表示中国电信 网络注册状态 AT+CREG?  第二个参数为0 表示没有注册网络,为1表示网络已注册 信号强度 AT+CSQ  数值越大表明信号质量越好; **PPP拨号方式** 内核配置好后,编译生成新的镜像烧录到开发板中 启动系统时,会看到如下信息  接下来需要使用到pppd软件,需要通过 pppd 这个软件来实现 ppp 拨号上网 。 下载网址:[Index of /pub/ppp (samba.org)](https://download.samba.org/pub/ppp/) 下载好后交叉编译,在make install的时候可能会报下面这种类型的错误 ``` strip: Unable to recognise the format of the input file 'xxxxxxx' ``` 解决方法:[ppp-2.4.5移植(交叉编译)_ppp交叉编译-CSDN博客](https://blog.csdn.net/y7u8t6/article/details/101376011) 编译生成好的四个可执行文件:chat pppd pppdump pppstats 将这四个文件拷贝到开发板的/bin文件夹下 输入`pppd -v`如下pp图所示,表示移植成功。  ppp拨号方式需要编写三个脚本文件存放在/etc/ppp/peers下 默认是没有这些文件夹的,所以需要去创建ppp和peer文件夹,创建好后在peers下创建如下三个脚本文件 **rasppp.sh** ```shell #!/bin/sh hide-password noauth connect '/bin/chat -s -v -f /etc/ppp/peers/rasppp-chat-connect.sh' disconnect '/bin/chat -s -v -f /etc/ppp/peers/rasppp-chat-disconnect.sh' debug /dev/ttyUSB3 115200 defaultroute noipdefault novj novjccomp noccp ipcp-accept-local ipcp-accept-remote local lock dump nodetach #这里我用的是电信卡 user card password card #如果是移动或者联通的卡将上面两行改为 #user Anyname #password Anypassword crtscts remotename 3gppp ipparam 3gppp usepeerdns ``` **rasppp-chat-connect.sh** ```shell TIMEOUT 15 ABORT "BUSY" ABORT "ERROR" ABORT "NO ANSWER" ABORT "NO CARRTER" ABORT "NO DIALTONE" ""AT OK \rATZ OK \rAT+CGDCONT=1,"IP","" OK-AT-OK ATDT#777 CONNECT \d\c ``` **rasppp-chat-disconnect.sh** ```shell ORT "ERROR" ABORT "NO DIALTONE" SAY "\NSending break to the modem\n" ""\k" ""+++ATH" SAY "\nGood bye !\n" ``` 添加完以上三个脚本文件后,现在可以使用 `ppp` 尝试拨号 ``` pppd call rasppp.sh & #后台进行拨号 ``` 如果拨号正常如下图所示  从程序的输出中我们可以获得以下信息: 本机IP 10.86.31.158 主要 DNS 服务器:202.103.24.68 次要 DNS 服务器: 202.103.44.150 当我们使用`ifconfig`查看网络信息会发现一个ppp0的网络  此时我们需要通过上面获得的网络信息来配置这个ppp0网络 ``` sudo ip route add default via 10.86.31.158 echo "nameserver 202.103.24.68" | tee -a /etc/resolv.conf echo "nameserver 202.103.44.150" | tee -a /etc/resolv.conf ``` 配置好之后我们就可以上网了,可以ping百度来测试  **ECM模式拨号上网** 上面的ppp模式拨号较为繁琐,需要大量的步骤依赖pppd软件,并且ppp拨号的稳定性不强,所以接下来介绍ECM模式,只需要AT命令就可以拨号上网 当我们上电4G模块之后,我们发送如下AT命令切换模块的工作模式为ECM ``` microcom /dev/ttyUSB3 -s 115200 AT+QCFG="usbnet",1 ``` 发送AT命令后,模块会自动重启,如下图所示  我们在`ifconfig`查看网络时候,可以看到多了一个usb0网络,并且自动获取IP地址  同样,我们可以ping百度测试上网功能  **如果使用Linux5.10内核版本,默认内核是没有开启cdc_ether模块即ECM模式,所以要配置内核驱动ECM模式** `cdc_ether`是Linux操作系统中的一个内核模块,用于支持USB CDC(Communications Device Class)以太网设备。这个模块允许系统将某些USB设备(例如4G/5G调制解调器、智能手机、USB以太网适配器)识别和配置为网络接口,使其能够像传统的以太网设备一样进行网络通信。 当切换到ECM模式后,cdc_ether模块会自动加载,加载`cdc_ether`模块后,系统会创建一个新的网络接口(例如`usb0`),用户可以通过该接口进行网络配置和通信。 内核配置如下 ``` Device Drivers -> [*] Network device support -> <*> USB Network Adapters ---> <*> Multi-purpose USB Networking Framework ----> -*- CDC Ethernet support (smart devices such as cable modems) ``` ## 3.11 RK3568自带的NPU ### 3.11.1 应用程序测试 测试的程序是一个yolov5的目标识别demo,编译环境是Linux arm64系统 先去github下载RKNPU2并解压生成rknpu2-master文件夹 [GitHub - rockchip-linux/rknpu2](https://github.com/rockchip-linux/rknpu2?tab=readme-ov-file) 1. 进入~/rk3568/rknpu2-master/examples/rknn_yolov5_demo目录 2. `vim build-linux_RK3566_RK3568.sh` 3. 更改交叉编译器路径  4. 授予build-linux_RK3566_RK3568.sh执行权限,./build-linux_RK3566_RK3568.sh 编译好了之后会生成install文件,里面就有官方提供的rknn模型,可执行程序,以及相应的动态库文件,如下  5. 用adb命令将~/rk3568/rknpu2-master/examples/rknn_yolov5_demo/install目录下的rknn_yolov5_demo_Linux文件夹上传到开发板的/data目录下 6. 指定库文件路径 `export LD_LIBRARY_PATH=/data/rknn_yolov5_demo_Linux/lib ` 7. 运行程序识别相应的图片中物体的类别。`./rknn_yolov5_demo ./model/RV1106/yolov5s-640-640.rknn ./model/bus.jpg `  识别的结果会以out.jpg保存在当前目录  ## 3.12 DIO测试 ### 3.12.1 硬件原理图说明     ### 3.12.2 Din测试  按照上图的说明方法,将Din-0短接GND,此时Din-0输出低电平,测量R6114两侧的电压值,红表笔接一侧,黑笔接地。此时可以发现万用表显示电压为0.17v左右。其他的三个Din均是相同的方法。 **注意:为什么不是0V而是0.17v的微弱电压?** **因为从下图可以看出光耦内置三极管的CE结,饱合导通时会存在一定的压降,这个0.17v即为压降。**  ### 3.12.3 Dout测试  如上图所示连接好电路,以Dout-0为例说明,其他的Dout的测试方法均相同 输入`gpioset 0 4=0`,使gpio输出为低电平,用万用表测试R6211两端的电压正常情况均为0v。 输入`gpioset 0 4=1`,使gpio输出为高电平,用万用表测试R6211两端的电压正常情况均为3.3v。 **注意:在RK3568上如果某个gpio没有被复用,默认情况下该引脚的模式是gpio模式,但是此处的GPIO0_PA4例外,所以需要在设备树中特殊配置一下该引脚使用gpio模式。**  ### 3.12.4 Dout/ Din 联合测试  如上图所示将Din与Dout连接好,通过改变Dout的输出电平,检测Din是否收到对应的电平,以Din-0和Dout-0为例说明 输入`gpioset 0 4=0` `gpioget 3 3`,显示Din-0的电平应为0 输入`gpioset 0 4=1` `gpioget 3 3`,显示Din-0的电平应为1 ## 3.13 AIN 电流电压测试 ### 3.13.1 硬件原理图说明   ### 3.13.2 AIN 电流测试 首先我们需要将ADC采样程序烧录到开发板上的单片机中 连接J6000 TTL下载调试串口 Debug_RXD_CN连接串口的TXD Debug_TXD_CN连接串口的RXD GND相连  **打开FlyMcu.exe烧录工具,选择准备好的.hex 的单片机程序**  **点击开始编程后就开始烧录程序,烧录成功如下图,并且可以看到单片机的LED灯在闪烁绿光**  单片机程序烧录好后,我们需要使能RK3568的UART6,根据原理图可以看到,RK3568和MCU通信串口为UART6,所以需要在设备树中设置UART6设备节点 打开`~/rk3568/sdkv1.4.0_linux5.10/kernel/arch/arm64/boot/dts/rockchip/rk3568-evb1-ddr4-v10-linux.dts` 加入URAT6节点 ``` &uart6{ dma-names = "tx", "rx"; pinctrl-names = "default"; pinctrl-0 = <&uart6m1_xfer>; status = "okay"; }; ``` 重新编译设备树后烧录到开发板中启动开发板,在/dev下看看是否有ttyS6   按照上图连接电路后,用XCOM软件打开单片机的调试串口,配置如下图所示  在RK3568上运行comport程序,此程序可以配置串口的波特率,停止位,数据位,奇偶校验以及指定使用哪个串口设备 源代码在[framwork.git - Gitblit (iot-yun.club)](http://main.iot-yun.club:8088/tree/framwork.git/master/booster) 但是这个代码需要做一定的修改,因为这个程序只能让串口输出字符串数据,但是我们在测试中需要发送十六进制数据给单片机。 此时就需要了解ADC串口协议,RK3568发送读指令给MCU,MCU会响应RK3568返回ADC采样数据  示例如下: 示例: 1、读第0通道电压: AA 55 02 00 30 8C //CRC:0x8C30 AA 55 02 00 EE 0D 99 C0 //0D EE -> 3566mv, CRC:0x0C99 2、读第1路通道电压: AA 55 02 01 F1 4C AA 55 02 01 06 00 47 C5 //00 06 -> 6mv 3、读第2路通道电压: AA 55 02 02 B1 4D AA 55 02 02 06 00 B7 C5 //6mv 4、读第3路通道电压: AA 55 02 03 70 8D AA 55 02 03 06 00 E6 05 //6mv 5、读第0路电流 AA 55 01 00 30 7C AA 55 01 00 95 01 BB 71 //01 95 -> 405 单位0.01mA,即4.05mA, CRC:0x71BB 6、读第1路电流 AA 55 01 01 F1 BC AA 55 01 01 95 01 EA B1 7、读第2路电流 AA 55 01 02 B1 BD AA 55 01 02 95 01 1A B1 8、读第3路电流 AA 55 01 03 70 7D AA 55 01 03 95 01 4B 71 以下AIN电流测试以测试第0路电流为例 在RK3568上输入`./comport -d /dev/ttyS6 -b 115200 -s 8N1N -x` 在XCOM上可以看到MCU的调试信息,旋转电位器旋钮至最左或最右分别测量最小电流和最大电流,量程约为1.22mA~22.79mA(测试其他三路电流时最小电流约为0.006mA)  ### 3.12.3 AIN 电压测试 准备工作和AIN电流测试一样,不再赘述  运行comport程序让rk3568输出读取电压的指令给mcu 同样在XCOM上也能看到MCU的采样调试信息,旋转电位器旋钮至最左或最右分别测量最小电流和最大电流,量程约为0.017mV~5.882mV  documents/docs/RK3568_Linux_SDK开发文档/images/4g-1.png





















































































































































































































































































{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}